

دوره 25، شماره 1 - ( بهار 1403 )
دوره، شماره، فصل و سال، شماره مسلسل |
برگشت به فهرست نسخه ها


![]()
![]()
![]()
Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Mirbagheri S S, Aminian G, Bahramizadeh M, Dalvand H, Farahmand F, Vahedi M. Design and Evaluation of Dynamic Movement Orthosis on Functional Parameters in a Child With Spastic Diplegia Cerebral Palsy. Arch Rehabil 2024; 25 (1) :158-179
URL: http://rehabilitationj.uswr.ac.ir/article-1-3316-fa.html
URL: http://rehabilitationj.uswr.ac.ir/article-1-3316-fa.html
میرباقری صدیقه سادات، امینیان غلامرضا، بهرامی زاده محمود، دالوند حمید، فرهمند فرزام، واحدی محسن. طراحی و ارزیابی تأثیر ارتوز حرکتی داینامیک بر پارامترهای عملکردی در یک کودک مبتلابه فلج مغزی اسپاستیک دایپلژی. مجله توانبخشی. 1403; 25 (1) :158-179
URL: http://rehabilitationj.uswr.ac.ir/article-1-3316-fa.html
صدیقه سادات میرباقری1  ، غلامرضا امینیان1 ، محمود بهرامی زاده*2 ، حمید دالوند3 ، فرزام فرهمند4 ، محسن واحدی5
، غلامرضا امینیان1 ، محمود بهرامی زاده*2 ، حمید دالوند3 ، فرزام فرهمند4 ، محسن واحدی5
، غلامرضا امینیان1 ، محمود بهرامی زاده*2 ، حمید دالوند3 ، فرزام فرهمند4 ، محسن واحدی5
1- گروه ارتوز و پروتز، دانشکده علوم توانبخشی، دانشگاه علوم توانبخشی و سلامت اجتماعی، تهران، ایران.
2- گروه ارتوز و پروتز، دانشکده علوم توانبخشی، دانشگاه علوم توانبخشی و سلامت اجتماعی، تهران، ایران. ،ma.bahramizadeh@uswr.ac.ir
3- گروه کاردرمانی، دانشکده توانبخشی، دانشگاه تهران، تهران، ایران.
4- گروه مهندسی مکانیک، دانشکده مهندسی مکانیک، دانشگاه صنعتی شریف، تهران، ایران.
5- گروه آمار زیستی و اپیدمیولوژی، دانشکده سلامت اجتماعی، دانشگاه علوم توانبخشی و سلامت اجتماعی، تهران، ایران.
2- گروه ارتوز و پروتز، دانشکده علوم توانبخشی، دانشگاه علوم توانبخشی و سلامت اجتماعی، تهران، ایران. ،
3- گروه کاردرمانی، دانشکده توانبخشی، دانشگاه تهران، تهران، ایران.
4- گروه مهندسی مکانیک، دانشکده مهندسی مکانیک، دانشگاه صنعتی شریف، تهران، ایران.
5- گروه آمار زیستی و اپیدمیولوژی، دانشکده سلامت اجتماعی، دانشگاه علوم توانبخشی و سلامت اجتماعی، تهران، ایران.
متن کامل [PDF 2823 kb]
(1456 دریافت)
| چکیده (HTML) (4550 مشاهده)


مزایای طرح جدید
قابلیت اندازهگیری در دو سایز جهت کودکان 6 تا 12 سال که از لحاظ ارتفاع اندام تحتانی متفاوت هستند و کوتاه شدن فرایند ساخت سفارشی؛ قابلیت تنظیم فشار محیطی از طریق استرپهای ناحیه ران و ساق و برطرف شدن مشکل تنگ یا گشاد بودن ارتوز در طرح قبل؛ پوشیدن و درآوردن راحتتر نسبت به طرح قبل و طرح لباسهای سرهم؛ تسهیل دستشویی رفتن نسبت به طرح قبل و لباس سرهم بهطوری که با باز کردن چسب اتصال قسمت اندام تحتانی به کمر و بدون باز کردن کل ارتوز مسئله دستشویی رفتن رفع شده است.
پس از آماده شدن طرح دوم، مراحل اجرا جهت انجام ارزیابیها آغاز شد. مرحله دوم شامل ارزیابی و اعتبارسنجی ارتوز نهایی با مطالعه تکنمونهای با طرح ترکیبی بهصورت (A-B-BC-A) برای نمونه موردمطالعه بود.
پروتکل مطالعه
فاز پایه (A1) دوره کنترل است. در هر فاز شرکتکننده تحت درمانهای معمول کاردرمانی (تمرینات کاهش اسپاستیسیته، راه رفتن، تمریتات تعادلی، تمرینات هماهنگی دوطرفه، تمرینات مقاومتی و غیره) بهصورت 3 بار در هفته قرار میگرفت و آزمونهای عملکردی ازجمله آزمون 10 متر راه رفتن، تعادل در حین راه رفتن، معیار اشورث جهت ارزیابی اسپاستیسیته همسترینگ راست و چپ و مقیاس عملکرد کاری کانادایی در یک دوره یکماهه، (4 هفتهای) و ارزیابی 2 بار در هفته انجام شد و نتایج ارزیابیها توسط کارشناس ارشد کاردرمانی که در روند مطالعه حضور داشت ثبت شد. پس از فاز پایه، طرح موردنظر دارای دو فاز مداخله بود؛ مداخله اول شامل ارتوز داینامیک حرکتی (B) و مداخله دوم ارتوز داینامیک حرکتی با فنرهای زانو و مچبند (BC) بود که بهطور تصادفی انتخاب شد. نحوه پوشیدن ارتوز در فازهای مداخله بهصورتی بود که جهت پیشگیری از تأثیر پوشیدن کفش و ارتوزها، حداقل 5 ساعت در منزل و در زمانی غیر از زمان خوابیدن و بدون کفش یا صندل پوشیده میشد. محدودیتی در ممتد بودن پوشیدن ارتوز وجود نداشت و تمام آزمونهای عملکردی بدون کفش انجام شد. فاز پس از مداخله (A2) شامل فاز پیگیری بود که طول آن نیز 4 هفته بود و مانند فاز پایه، کودک تحت تمرینات کاردرمانی قرار میگرفت. همچنین هر هفته 2 بار آزمونهای عملکردی انجام شد.
یافتهها
نتایج حاصل از مراحل طراحی ارتوز، به طراحی و ساخت ارتوز داینامیک حرکتی سفارشیساز در دو سایز برای سنین 6 تا 12 سال منجر شد. در بین ارتوزهای داینامیک و بهعبارتی گارمنتها، این ارتوز داینامیک حرکتی اولین و تنها ارتوزی است که در آن از قطعات تقویتکننده داینامیک در مفاصل زانو و مچ استفاده شده است. فنرهای استفادهشده از مفتول استیل با ضخامت 12 میلیمتر هستند. همچنین این فنرها، فنرهای دوبلشده با عرض یک سانتیمتر هستند که نورد شدهاند (تصویر شماره 4).


متن کامل: (1901 مشاهده)
مقدمه
اختلال فلج مغزی، شایعترین ناتوانی حرکتی در دوران کودکی است که شامل مجموعهای از اختلالات در تکامل حرکت و پاسچر بوده و باعث محدودیت در فعالیت میشود [1]. شیوع فلج مغزی از 1/5 تا 4 در هر 1000 تولد زنده گزارش شده است [2] و شیوع آن در ایران 2/06 در هر 1000 تولد زنده است [3]. از علائمی که غالباً در کودکان دارای فلج مغزی مشاهده میشود، اسپاستیسیتی است که طبق تعریف لانس یک اختلال حرکتی است که مشخصه آن افزایش وابسته به سرعت در رفلکسهای کششی تونیک (تون عضلات) همراه با تشدید جهشهای ناگهانی تاندون است، که از تحریک بیش از حد رفلکس کششی بهعنوان بخشی از سندروم نورون محرکه فوقانی ناشی میشود. سهچهارم (77/4 درصد) فلج مغزی کودکان را فلج مغزی نوع اسپاستیک تشکیل میدهد [2]. اسپاستیسیتی همراه با ضعف عضلات، توانایی حرکت را در کودکان دارای فلج مغزی محدود میکند. همچنین فرد مبتلا از اختلال در عملکرد حرکتی درشت [4] مانند آسیب در حرکت و کنترل پاسچر [5] و اختلال در راه رفتن [6] رنج میبرد. الگوهای غیرطبیعی راه رفتن نیز در کودکان دارای فلج مغزی اسپاستیک اساساً بهخاطر اسپاستیسیته و کانتراکچر فلکسورهای زانو و هیپ و پلنتارفلکسورهای مچ پاست [7]. از رایجترین الگوهای راه رفتن در افراد دارای فلج مغزی اسپاستیک 5 تا 21 سال، فلکشن زانوی بیش از حد (66 درصد) و زانوی سفتشده در فاز سویینگ (63 درصد) و فلکشن و اداکشن بیش از حد هیپ (57 درصد) است [8]. همچنین الگوی راه رفتن کودکان فلج مغزی اسپاستیک دایپلژی با استفاده از معیار رودا براساس وضعیت مچ، زانو، ران و لگن به 5 گروه طبقهبندی شده است. در این میان، گروه چهارم الگوی راه رفتن کروچ است که رایجترین الگوی راه رفتن در کودکان دارای فلج مغزی دوطرفه است و با دورسی فلکشن مچ پا، فلکشن زانو و ران همراه است [7]. راه رفتن با زانو در وضعیت فلکشن، به افزایش استرس مفصلی در مفاصل تیبیوفمورال و پتلوفمورال منجر میشود و همچنین شدت راه رفتن کروچ را افزایش میدهد [9]. گشتاورهای اکستانسوری داخلی بزرگتری برای حفظ یا مقابله با این پاسچر بهویژه در زانو نیاز است که نشاندهنده یک استرس عضلانی مضر است [9]. به هر حال، استرس مکانیکی بیش از حد اطراف این مفصل، ممکن است به دفورمیتیهای اسکلتی در حین رشد، استرس شکستگی پتلا [10]، درد و خستگی عضلانی [11] منجر شود. درنهایت، توانایی راه رفتن کودکانی که با الگوی کروچ راه میروند در طولانیمدت کاهش مییابد [12]. در الگوی کروچ، عضلات دومفصلی همچون همسترینگ دچار اسپاستیسیته و رکتوس فموریس دارای ضعف هستند. روشهای درمانی در کودکان فلج مغزی با الگوی کروچ روشهای جراحی و غیرجراحی است. وقتی عضله همسترینگ دچار کوتاهی استاتیک نباشد، میتوان از روشهای غیرجراحی همچون تزریق بوتولینوم توکسین، تقویت عضلات و ارتوز استفاده کرد [13]. در یک مرور سیستماتیک در سال 2017، تنها دو مقاله به ارزیابی اثر ارتوزی بر الگوی راه رفتن کروچ و بیومکانیک مفاصل اندام تحتانی پرداختهاند [14، 15]. استفاده از روشهای ارتوزی در زمانی که اسپاستیسیته عضله همسترینگ هنوز بهصورت داینامیک است و نیاز به جراحی نیست، جهت محدود کردن فلکشن بیش از حد مفاصل اندام تحتانی در حین راه رفتن ضروری است. محدود کردن فلکشن اندام تحتانی، سازگاریهای ثانویه را کاهش داده و عملکرد راه رفتن و کیفیت زندگی را بهبود میبخشد.
اخیراً با استفاده از اصول نوروفیزیولوژیکی، ارتوزهای داینامیک لیکرا بهعنوان شکلی از مدالیته درمانی برای کودکان دارای فلج مغزی توسعه یافتهاند [16]. ارتوزهای داینامیک لیکرا بهطور مستقیم قابلمقایسه با ارتوزهای مچپایی که سخت هستند، نیستند. ارتوزهای حرکتی داینامیک، گارمنتهایی منعطف هستند که در اتصال با ارتوزهای سخت و در برخی موارد بهجای آنها میتوانند استفاده شوند و هر بخش از بدن که مبتلا به اسپاستیسیته است میتوانند دربر بگیرند. این الیاف مصنوعی مثل نئوپرن و لیکرا بهشکل لباسهای تنگ بوده و بهگونهای طراحی شدهاند که سفارشیساز و براساس اندازهگیریهای انجامشده از بدن کودک هستند و بدن یا اندام فردی که مبتلاست را بهصورت محیطی میپوشانند. ویژگی ذاتی طرح گارمنتها این است که پوشنده را قادر میسازد تا حرکت کند، بنابراین به ارتوزداینامیک اشاره دارد. بهطور رایج، این انواع از ارتوزها برای کودکان دارای فلج مغزی فراهم شده و بهعنوان راهکار تکمیلی برای درمانهای دیگر مثل فیزیوتراپی و کاردرمانی نیز استفاده میشوند. اثرات مطلوب ارتوزهای داینامیک لیکرا بر بیومکانیک و راستای بدن، افزایش حس و ورودی حس عمقی در انواع مختلفی از کودکان دارای فلج مغزی گزارش شده است [17-20]. این ویژگیها همچنین ممکن است عملکرد دست و اندام فوقانی را در کودکان فلج مغزی یکطرفه بهبود بخشند [21]. این ارتوزهای الاستیک درواقع با افزایش فشار بر گروههای عضلانی معین، ممکن است حس عمقی را افزایش داده و حرکات مفصل را تسهیل کنند [22] و آگاهی بدن را افزایش دهند [20]. واتسون و همکاران در سال 2007 پیشنهاد کردند که ارتوزهای حرکتی داینامیک ممکن است در شرایط نورولوژیکی با کشش طولانی بر عضلات کوتاهشده و تعدیل حرکات اضافی و ناکارآمد، به حمایت نواحی بیثبات بدن و افزایش فیدبک حسی کمک کنند [23]. از دیگر مزایای استفاده از این ارتوزها، علاوه بر نرم بودن و سبک بودن آنها، میتوان به بهبود پاسچر و راستای اندام، تعدیل تون عضلات، کاهش حرکات غیرارادی، بهبود عملکرد و استقلال اشاره کرد [24]. در مطالعهای موردی در سال 2023 تأثیر مثبت استفاده از تراتاگ (یکی از انواع گارمنتهای موجود) را بر عملکرد حرکتی درشت و پاسچر یک کودک 17ماهه نشان دادند [25]. ارتوزهای داینامیکی که در مطالعات قبلی ذکر شده، اکثراً از جنس لیکرا و بهصورت سوییت یا لباس سرهم بودهاند و مشکلاتی را در سختی پوشیدن و درآوردن، مسائل مربوط به دستشویی رفتن و گرمای ناشی از پوشیدن ارتوز بههمراه داشتهاند [18]. در یک مطالعه به طراحی و توسعه یک ارتوز مچپایی نرم برای کودکانی که از AFO ترموپلاستیک استفاده میکردند پرداخته شده است. اگرچه AFOهای ترموپلاستیک حمایتکنندههای سودمندی هستند، درصد بالایی از عدم استفاده از این ارتوزها بهعلت طرح، کاربرد، عدم راحتی، عدم توانایی پوشیدن ارتوزها با کفش دلخواه و شرکت در فعالیتهای مختلف رسمی و غیررسمی بهعلت سخت و حجیم بودن آنها گزارش شده است. در این مطالعه ارزیابی و اعتبارسنجی AFO نرم انجام شد و این ارتوز یک ارتوز مفید و یک پیشنهاد مطلوب برای کودکان فلج مغزی گزارش شد که کودک میتواند در کنار استفاده از AFO ترموپلاستیک، از آن استفاده کند و حق انتخاب کفش دلخواه خود را دارد [26]. در بررسی مطالعات مربوط به تأثیر انواع ارتوزها در راه رفتن کروچ، اکثر مطالعات به بررسی انواعی از ارتوزهای سخت مانند ارتوز مچ پایی فلور ریاکشن در راه رفتن کروچ پرداختهاند و اگرچه بهبودیهایی در کینماتیک زانو نشان دادهاند ولی درمورد راحتی و پذیرش این ارتوزها شواهدی موجود نیست. اما شواهدی توصیفی از پذیرش و راحتی ارتوزهای داینامیک و از نوع نرم، برای کودکان دارای فلج مغزی وجود دارد [27]. تا کنون هیچ مطالعهای اثر ارتوزهای نرم تقویتشده در ناحیه زانو و مچ را در این دسته از کودکان فلج مغزی بررسی نکرده است. هدف این مطالعه، طراحی یک ارتوز حرکتی داینامیک و از نوع نرم بود که با ایجاد ساختار اضافه در زانو و مچ و با بهبود راستای بیومکانیکی مفاصل اندام تحتانی بهویژه زانو بر متغیرهای عملکردی راه رفتن همچون اسپاستیسیته همسترینگ، سرعت و تعادل در حین راه رفتن نیز مؤثر باشد. همچنین از اهداف این مطالعه، ارزیابی ارتوز موردنظر از لحاظ عملکرد کاری و رضایت از عملکرد کاری کودک بود.
روشها
این مطالعه یک مطالعه بنیادی ـ کاربردی از نوع طراحی و ساخت و از نوع مطالعات تکنمونهای با طرح ترکیبی است که در دو مرحله و بهصورت A-B-BC-A اجرا شد.
مرحله اول، طراحی ارتوز حرکتی و رفع نواقص اولیه و مرحله دوم، ارزیابی اثر ارتوز بر پارامترهای عملکردی راه رفتن و بررسی عملکرد کاری و رضایت از عملکرد کاری کودک توسط والدین بود. این مطالعه در شهر همدان، در سال 1401 و در کلینیک کاردرمانی توانا انجام شد. مراحل تهیه مواد و ساخت ارتوز توسط شرکت تجهیزات ارتوپدی طب و صنعت در تهران و زیر نظر محققان ارتز و پروتز تیم پژوهش انجام گرفت.
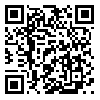
در این مرحله، طرح اولیه ارتوز بهصورت یک ارتوز دربرگیرنده اندام تحتانی (شلوار) از جنس نئوپرن (Ancient Eagle.CR30.SBR70) بود که با اندازهگیری از نواحی مشخص بر روی اندام (تصویر شماره 1) و مختص هر فرد ساخته شد. طرح اولیه، طرح تکمیلی و بهبودیافته از یک ارتوز نئوپرنی بود که در مطالعهای قبل از این مطالعه مورد ارزیابی قرار گرفته بود [28].
اختلال فلج مغزی، شایعترین ناتوانی حرکتی در دوران کودکی است که شامل مجموعهای از اختلالات در تکامل حرکت و پاسچر بوده و باعث محدودیت در فعالیت میشود [1]. شیوع فلج مغزی از 1/5 تا 4 در هر 1000 تولد زنده گزارش شده است [2] و شیوع آن در ایران 2/06 در هر 1000 تولد زنده است [3]. از علائمی که غالباً در کودکان دارای فلج مغزی مشاهده میشود، اسپاستیسیتی است که طبق تعریف لانس یک اختلال حرکتی است که مشخصه آن افزایش وابسته به سرعت در رفلکسهای کششی تونیک (تون عضلات) همراه با تشدید جهشهای ناگهانی تاندون است، که از تحریک بیش از حد رفلکس کششی بهعنوان بخشی از سندروم نورون محرکه فوقانی ناشی میشود. سهچهارم (77/4 درصد) فلج مغزی کودکان را فلج مغزی نوع اسپاستیک تشکیل میدهد [2]. اسپاستیسیتی همراه با ضعف عضلات، توانایی حرکت را در کودکان دارای فلج مغزی محدود میکند. همچنین فرد مبتلا از اختلال در عملکرد حرکتی درشت [4] مانند آسیب در حرکت و کنترل پاسچر [5] و اختلال در راه رفتن [6] رنج میبرد. الگوهای غیرطبیعی راه رفتن نیز در کودکان دارای فلج مغزی اسپاستیک اساساً بهخاطر اسپاستیسیته و کانتراکچر فلکسورهای زانو و هیپ و پلنتارفلکسورهای مچ پاست [7]. از رایجترین الگوهای راه رفتن در افراد دارای فلج مغزی اسپاستیک 5 تا 21 سال، فلکشن زانوی بیش از حد (66 درصد) و زانوی سفتشده در فاز سویینگ (63 درصد) و فلکشن و اداکشن بیش از حد هیپ (57 درصد) است [8]. همچنین الگوی راه رفتن کودکان فلج مغزی اسپاستیک دایپلژی با استفاده از معیار رودا براساس وضعیت مچ، زانو، ران و لگن به 5 گروه طبقهبندی شده است. در این میان، گروه چهارم الگوی راه رفتن کروچ است که رایجترین الگوی راه رفتن در کودکان دارای فلج مغزی دوطرفه است و با دورسی فلکشن مچ پا، فلکشن زانو و ران همراه است [7]. راه رفتن با زانو در وضعیت فلکشن، به افزایش استرس مفصلی در مفاصل تیبیوفمورال و پتلوفمورال منجر میشود و همچنین شدت راه رفتن کروچ را افزایش میدهد [9]. گشتاورهای اکستانسوری داخلی بزرگتری برای حفظ یا مقابله با این پاسچر بهویژه در زانو نیاز است که نشاندهنده یک استرس عضلانی مضر است [9]. به هر حال، استرس مکانیکی بیش از حد اطراف این مفصل، ممکن است به دفورمیتیهای اسکلتی در حین رشد، استرس شکستگی پتلا [10]، درد و خستگی عضلانی [11] منجر شود. درنهایت، توانایی راه رفتن کودکانی که با الگوی کروچ راه میروند در طولانیمدت کاهش مییابد [12]. در الگوی کروچ، عضلات دومفصلی همچون همسترینگ دچار اسپاستیسیته و رکتوس فموریس دارای ضعف هستند. روشهای درمانی در کودکان فلج مغزی با الگوی کروچ روشهای جراحی و غیرجراحی است. وقتی عضله همسترینگ دچار کوتاهی استاتیک نباشد، میتوان از روشهای غیرجراحی همچون تزریق بوتولینوم توکسین، تقویت عضلات و ارتوز استفاده کرد [13]. در یک مرور سیستماتیک در سال 2017، تنها دو مقاله به ارزیابی اثر ارتوزی بر الگوی راه رفتن کروچ و بیومکانیک مفاصل اندام تحتانی پرداختهاند [14، 15]. استفاده از روشهای ارتوزی در زمانی که اسپاستیسیته عضله همسترینگ هنوز بهصورت داینامیک است و نیاز به جراحی نیست، جهت محدود کردن فلکشن بیش از حد مفاصل اندام تحتانی در حین راه رفتن ضروری است. محدود کردن فلکشن اندام تحتانی، سازگاریهای ثانویه را کاهش داده و عملکرد راه رفتن و کیفیت زندگی را بهبود میبخشد.
اخیراً با استفاده از اصول نوروفیزیولوژیکی، ارتوزهای داینامیک لیکرا بهعنوان شکلی از مدالیته درمانی برای کودکان دارای فلج مغزی توسعه یافتهاند [16]. ارتوزهای داینامیک لیکرا بهطور مستقیم قابلمقایسه با ارتوزهای مچپایی که سخت هستند، نیستند. ارتوزهای حرکتی داینامیک، گارمنتهایی منعطف هستند که در اتصال با ارتوزهای سخت و در برخی موارد بهجای آنها میتوانند استفاده شوند و هر بخش از بدن که مبتلا به اسپاستیسیته است میتوانند دربر بگیرند. این الیاف مصنوعی مثل نئوپرن و لیکرا بهشکل لباسهای تنگ بوده و بهگونهای طراحی شدهاند که سفارشیساز و براساس اندازهگیریهای انجامشده از بدن کودک هستند و بدن یا اندام فردی که مبتلاست را بهصورت محیطی میپوشانند. ویژگی ذاتی طرح گارمنتها این است که پوشنده را قادر میسازد تا حرکت کند، بنابراین به ارتوزداینامیک اشاره دارد. بهطور رایج، این انواع از ارتوزها برای کودکان دارای فلج مغزی فراهم شده و بهعنوان راهکار تکمیلی برای درمانهای دیگر مثل فیزیوتراپی و کاردرمانی نیز استفاده میشوند. اثرات مطلوب ارتوزهای داینامیک لیکرا بر بیومکانیک و راستای بدن، افزایش حس و ورودی حس عمقی در انواع مختلفی از کودکان دارای فلج مغزی گزارش شده است [17-20]. این ویژگیها همچنین ممکن است عملکرد دست و اندام فوقانی را در کودکان فلج مغزی یکطرفه بهبود بخشند [21]. این ارتوزهای الاستیک درواقع با افزایش فشار بر گروههای عضلانی معین، ممکن است حس عمقی را افزایش داده و حرکات مفصل را تسهیل کنند [22] و آگاهی بدن را افزایش دهند [20]. واتسون و همکاران در سال 2007 پیشنهاد کردند که ارتوزهای حرکتی داینامیک ممکن است در شرایط نورولوژیکی با کشش طولانی بر عضلات کوتاهشده و تعدیل حرکات اضافی و ناکارآمد، به حمایت نواحی بیثبات بدن و افزایش فیدبک حسی کمک کنند [23]. از دیگر مزایای استفاده از این ارتوزها، علاوه بر نرم بودن و سبک بودن آنها، میتوان به بهبود پاسچر و راستای اندام، تعدیل تون عضلات، کاهش حرکات غیرارادی، بهبود عملکرد و استقلال اشاره کرد [24]. در مطالعهای موردی در سال 2023 تأثیر مثبت استفاده از تراتاگ (یکی از انواع گارمنتهای موجود) را بر عملکرد حرکتی درشت و پاسچر یک کودک 17ماهه نشان دادند [25]. ارتوزهای داینامیکی که در مطالعات قبلی ذکر شده، اکثراً از جنس لیکرا و بهصورت سوییت یا لباس سرهم بودهاند و مشکلاتی را در سختی پوشیدن و درآوردن، مسائل مربوط به دستشویی رفتن و گرمای ناشی از پوشیدن ارتوز بههمراه داشتهاند [18]. در یک مطالعه به طراحی و توسعه یک ارتوز مچپایی نرم برای کودکانی که از AFO ترموپلاستیک استفاده میکردند پرداخته شده است. اگرچه AFOهای ترموپلاستیک حمایتکنندههای سودمندی هستند، درصد بالایی از عدم استفاده از این ارتوزها بهعلت طرح، کاربرد، عدم راحتی، عدم توانایی پوشیدن ارتوزها با کفش دلخواه و شرکت در فعالیتهای مختلف رسمی و غیررسمی بهعلت سخت و حجیم بودن آنها گزارش شده است. در این مطالعه ارزیابی و اعتبارسنجی AFO نرم انجام شد و این ارتوز یک ارتوز مفید و یک پیشنهاد مطلوب برای کودکان فلج مغزی گزارش شد که کودک میتواند در کنار استفاده از AFO ترموپلاستیک، از آن استفاده کند و حق انتخاب کفش دلخواه خود را دارد [26]. در بررسی مطالعات مربوط به تأثیر انواع ارتوزها در راه رفتن کروچ، اکثر مطالعات به بررسی انواعی از ارتوزهای سخت مانند ارتوز مچ پایی فلور ریاکشن در راه رفتن کروچ پرداختهاند و اگرچه بهبودیهایی در کینماتیک زانو نشان دادهاند ولی درمورد راحتی و پذیرش این ارتوزها شواهدی موجود نیست. اما شواهدی توصیفی از پذیرش و راحتی ارتوزهای داینامیک و از نوع نرم، برای کودکان دارای فلج مغزی وجود دارد [27]. تا کنون هیچ مطالعهای اثر ارتوزهای نرم تقویتشده در ناحیه زانو و مچ را در این دسته از کودکان فلج مغزی بررسی نکرده است. هدف این مطالعه، طراحی یک ارتوز حرکتی داینامیک و از نوع نرم بود که با ایجاد ساختار اضافه در زانو و مچ و با بهبود راستای بیومکانیکی مفاصل اندام تحتانی بهویژه زانو بر متغیرهای عملکردی راه رفتن همچون اسپاستیسیته همسترینگ، سرعت و تعادل در حین راه رفتن نیز مؤثر باشد. همچنین از اهداف این مطالعه، ارزیابی ارتوز موردنظر از لحاظ عملکرد کاری و رضایت از عملکرد کاری کودک بود.
روشها
این مطالعه یک مطالعه بنیادی ـ کاربردی از نوع طراحی و ساخت و از نوع مطالعات تکنمونهای با طرح ترکیبی است که در دو مرحله و بهصورت A-B-BC-A اجرا شد.
مرحله اول، طراحی ارتوز حرکتی و رفع نواقص اولیه و مرحله دوم، ارزیابی اثر ارتوز بر پارامترهای عملکردی راه رفتن و بررسی عملکرد کاری و رضایت از عملکرد کاری کودک توسط والدین بود. این مطالعه در شهر همدان، در سال 1401 و در کلینیک کاردرمانی توانا انجام شد. مراحل تهیه مواد و ساخت ارتوز توسط شرکت تجهیزات ارتوپدی طب و صنعت در تهران و زیر نظر محققان ارتز و پروتز تیم پژوهش انجام گرفت.
در این مرحله، طرح اولیه ارتوز بهصورت یک ارتوز دربرگیرنده اندام تحتانی (شلوار) از جنس نئوپرن (Ancient Eagle.CR30.SBR70) بود که با اندازهگیری از نواحی مشخص بر روی اندام (تصویر شماره 1) و مختص هر فرد ساخته شد. طرح اولیه، طرح تکمیلی و بهبودیافته از یک ارتوز نئوپرنی بود که در مطالعهای قبل از این مطالعه مورد ارزیابی قرار گرفته بود [28].
با توجه به نیازی که در بهبود راستای بیومکانیکی اندام تحتانی در کودکان فلج مغزی با الگوی کروچ وجود داشت و برای افزایش ثبات بهتر در صفحه ساجیتال در ناحیه زانو، در ارتوز اولیه در ناحیه زانو قطعات تقویتکننده در نظر گرفته شد. همچنین جهت اصلاح راستای بیومکانیکی اندام تحتانی، از اصلاح راستای مفاصل در زنجیره بسته حرکتی استفاده شد و از یک قطعه مچپایی مانند حمایتکنندههای مچ پا با قطعات تقویتی فنر و یک قطعه کش ثباتدهنده که بهصورت 8 به دور مچ بسته میشد، استفاده شد. این قطعه درواقع یک AFO نرم بود که به اصلاح زوایای مفصل مچ در صفحه ساجیتال پرداخته و باعث اصلاح زوایای بیومکانیکی در مفاصل بالاتر در زنجیره بسته حرکتی میشد. علت انتخاب فنر بهعنوان قطعه تقویتی در مفصل زانو، داینامیک بودن ارتوز است. بهعبارتی، هدف از طراحی چنین ارتوزی برای کودکان فلج مغزی، استفاده از مواد نرم جهت راحتی پوشیدن نسبت به ارتوزهای سخت و همچنین محدود نکردن مطلق حرکت در مفاصل بود. بنابراین از 4 فنر در اطراف زانو برای ثبات مفصل در صفحه ساجیتال استفاده شد. با توجه به اینکه در الگوی راه رفتن کروچ، بهعلت اسپاستیسیته عضله همسترینگ از یک سو و ضعف عضلات اکستانسور زانو از سوی دیگر، بار زیادی بر عضلات اکستانسور وارد است که باعث میشود زاویه فلکشن زانو بهتدریج در حین راه رفتن بیشتر شود، بنابراین ارتوز داینامیک از دو طریق میتوانست به تحمل بار وارده به عضلات اکستانسور کمک کند که این عضلات کمتر دچار خستگی شوند؛ اول اینکه تنگ و فیت بودن ارتوز، خود بر اعمال گشتاور اکستانسوری بر مفصل زانو مؤثر است و از سوی دیگر فشار ناشی از ارتوز داینامیک بر عضلات اسپاستیک ممکن است بر تعدیل تون عضلات اسپاستیک ازجمله همسترینگ مؤثر باشد و بار وارده بر عضله اکستانسور زانو از این طریق نیز کمتر میشود. بنابراین ساختار طرح اولیه به شرح زیر نهایی شد:
ارتوز در بالا از ایلیاک کرست آغاز شده و تا ناحیه مچ پا امتداد داشت. ناحیه مچ و پا نیز توسط یک قطعه جدا، پوشانده میشد. در طرح اولیه ناحیه بالای مفصل هیپ و شکم از مواد نازکتر از نئوپرن و با کشسانی بیشتر استفاده شد تا فشار زیادی به شکم و سیستم گوارشی اعمال نشود. زیپهای جانبی در ناحیه تنه و ساق جهت سهولت در پوشیدن و درآوردن تعبیه شده بود (تصویر شماره 2).
ارتوز در بالا از ایلیاک کرست آغاز شده و تا ناحیه مچ پا امتداد داشت. ناحیه مچ و پا نیز توسط یک قطعه جدا، پوشانده میشد. در طرح اولیه ناحیه بالای مفصل هیپ و شکم از مواد نازکتر از نئوپرن و با کشسانی بیشتر استفاده شد تا فشار زیادی به شکم و سیستم گوارشی اعمال نشود. زیپهای جانبی در ناحیه تنه و ساق جهت سهولت در پوشیدن و درآوردن تعبیه شده بود (تصویر شماره 2).
چهار فنر در اطراف هر مفصل زانو و 2 فنر اطراف هر مفصل مچ پا قرار گرفت. در ناحیه مچ پا فنرهای ثباتدهنده بههمراه یک استرپ الاستیک با هدف ثبات ناحیه مچ و اصلاح زنجیره کینماتیکی بسته از ناحیه پا قرار گرفت. اندازهگیریهای لازم جهت ساخت طرح اولیه و بررسی نقصها و عوامل بهینهسازی برای یک نمونه فراهم شد.
یک کودک فلج مغزی اسپاستیک دایپلژی[29] در بازه سنی 6 تا 12 سال، سطح یک یا دو از سیستم طبقهبندی عملکرد حرکتی درشت و الگوی راه رفتن کروچ که برای راه رفتن به وسایل خارجی کمکی مانند واکر احتیاج نداشت [29 ,30] و قادر به راه رفتن حداقل 10 متر بدون حمایت بود به مطالعه وارد شد. همکاری مناسب از سوی بیمار و خانواده [31]، نداشتن سابقه جراحی ارتوپدی در کمتر از 9 ماه گذشته [18، 31، 32] و نداشتن سابقه بیماری صرع و بیماریهای تنفسی [20] از معیارهای ورود به مطالعه و گذشت کمتر از 9 ماه از آخرین تزریق بوتولینوم توکسین و وجود دفورمیتی ثابتشده در اندام تحتانی از معیارهای خروج از مطالعه بود. پس از کسب رضایت کتبی و شفاهی از خانواده کودک و اخذ کد اخلاق، بررسیها انجام شد. با توجه به مکانیسم تنگ و فیت بودن ارتوز که از عوامل اثربخشی ارتوز محسوب میشود، در طرح اولیه اندازهگیری دقیق از هر فرد، پرو و تکمیل نهایی ارتوز زمانبر بود. همچنین اگرچه با تعبیه زیپهای جانبی در قسمت تنه و ساق، تا حدی سختی پوشیدن یا درآوردن ارتوز و مسئله دستشویی رفتن نسبت به لباسهای سرهم در مطالعات آسانتر شده بود، اما با اضافه شدن قطعات فنر در ناحیه زانو بهعلت تنگی بیشتر، این پروسه برای کودکان یا مراقبان دشوارتر شد. بنابراین برای بهینه کردن این طرح، طرح دوم در نظر گرفته شد.
در طرح دوم، جهت کاهش زمان فرایند اندازهگیری، پرو و تحویل، قابلیت تنظیم ارتوز با اندازههای فرد با تغییر نوع ماده الاستیک و تعبیه استرپهایی در ناحیه ران و ساق فراهم شد. ماده الاستیک استفادهشده در طرح دوم، نوع دیگری از انواع نئوپرن بود که خاصیت چسبندگی استرپ زبر روی آن وجود داشت. طرح دوم از سه بخش شامل بخش کمری، بخش پوشاننده اندام تحتانی تا بالای قوزکهای مچ با فنرهای تعبیهشده در مفصل زانو و بخش حمایتکننده مچ پا با فنر تعبیهشده در این ناحیه بود. هر قسمت از ارتوز دارای اهدافی بود؛ با توجه به فلکشن مفصل هیپ در کودکان با الگوی کروچ، بخش کمری در اتصال با بخش مربوط به اندام با هدف کمک به اصلاح راستای تنه و مفصل هیپ از طریق اعمال فشار و کشش به این ناحیه تعبیه شد. استرپهای ناحیه ران با هدف اعمال فشار بر عضلات اداکتور و استرپ ناحیه ساق در زیر پتلا جهت اعمال گشتاور اکستانسوری بر زانو مانند آنچه در ارتوز مچ پایی فلور ریاکشن وجود دارد، تعبیه شدند. چهار فنر در اطراف هر مفصل زانو تعبیه شد که در این مطالعه جهت مقایسه حالت بدون فنر ارتوز و حالت با فنر، قابل جدا شدن بودند. دو فنر و یک کش حمایتکننده در ناحیه مچ نیز در اطراف مفصل مچ جهت ایجاد ثبات و حفظ بهتر راستا در زنجیره بسته بیومکانیکی تعبیه شد. در طرح دوم، از نواحی مشخصشدهای برای کشیدن الگو استفاده شد. الگوی مربوط به دو سایز برای سن 6 تا 12 سال طراحی شد و اندازههای کودکان از نظر قدی و محیطی در بازه مربوط به هر کدام از این دو الگو قرار گرفت و ارتوز بهصورت سفارشیساز و در زمان کمتر و با خطای کمتر آماده شد. طراحی این ارتوز در نرمافزار پیشرفته طراحی لباس مارولوس انجام گرفت (تصویر شماره 3).
یک کودک فلج مغزی اسپاستیک دایپلژی[29] در بازه سنی 6 تا 12 سال، سطح یک یا دو از سیستم طبقهبندی عملکرد حرکتی درشت و الگوی راه رفتن کروچ که برای راه رفتن به وسایل خارجی کمکی مانند واکر احتیاج نداشت [29 ,30] و قادر به راه رفتن حداقل 10 متر بدون حمایت بود به مطالعه وارد شد. همکاری مناسب از سوی بیمار و خانواده [31]، نداشتن سابقه جراحی ارتوپدی در کمتر از 9 ماه گذشته [18، 31، 32] و نداشتن سابقه بیماری صرع و بیماریهای تنفسی [20] از معیارهای ورود به مطالعه و گذشت کمتر از 9 ماه از آخرین تزریق بوتولینوم توکسین و وجود دفورمیتی ثابتشده در اندام تحتانی از معیارهای خروج از مطالعه بود. پس از کسب رضایت کتبی و شفاهی از خانواده کودک و اخذ کد اخلاق، بررسیها انجام شد. با توجه به مکانیسم تنگ و فیت بودن ارتوز که از عوامل اثربخشی ارتوز محسوب میشود، در طرح اولیه اندازهگیری دقیق از هر فرد، پرو و تکمیل نهایی ارتوز زمانبر بود. همچنین اگرچه با تعبیه زیپهای جانبی در قسمت تنه و ساق، تا حدی سختی پوشیدن یا درآوردن ارتوز و مسئله دستشویی رفتن نسبت به لباسهای سرهم در مطالعات آسانتر شده بود، اما با اضافه شدن قطعات فنر در ناحیه زانو بهعلت تنگی بیشتر، این پروسه برای کودکان یا مراقبان دشوارتر شد. بنابراین برای بهینه کردن این طرح، طرح دوم در نظر گرفته شد.
در طرح دوم، جهت کاهش زمان فرایند اندازهگیری، پرو و تحویل، قابلیت تنظیم ارتوز با اندازههای فرد با تغییر نوع ماده الاستیک و تعبیه استرپهایی در ناحیه ران و ساق فراهم شد. ماده الاستیک استفادهشده در طرح دوم، نوع دیگری از انواع نئوپرن بود که خاصیت چسبندگی استرپ زبر روی آن وجود داشت. طرح دوم از سه بخش شامل بخش کمری، بخش پوشاننده اندام تحتانی تا بالای قوزکهای مچ با فنرهای تعبیهشده در مفصل زانو و بخش حمایتکننده مچ پا با فنر تعبیهشده در این ناحیه بود. هر قسمت از ارتوز دارای اهدافی بود؛ با توجه به فلکشن مفصل هیپ در کودکان با الگوی کروچ، بخش کمری در اتصال با بخش مربوط به اندام با هدف کمک به اصلاح راستای تنه و مفصل هیپ از طریق اعمال فشار و کشش به این ناحیه تعبیه شد. استرپهای ناحیه ران با هدف اعمال فشار بر عضلات اداکتور و استرپ ناحیه ساق در زیر پتلا جهت اعمال گشتاور اکستانسوری بر زانو مانند آنچه در ارتوز مچ پایی فلور ریاکشن وجود دارد، تعبیه شدند. چهار فنر در اطراف هر مفصل زانو تعبیه شد که در این مطالعه جهت مقایسه حالت بدون فنر ارتوز و حالت با فنر، قابل جدا شدن بودند. دو فنر و یک کش حمایتکننده در ناحیه مچ نیز در اطراف مفصل مچ جهت ایجاد ثبات و حفظ بهتر راستا در زنجیره بسته بیومکانیکی تعبیه شد. در طرح دوم، از نواحی مشخصشدهای برای کشیدن الگو استفاده شد. الگوی مربوط به دو سایز برای سن 6 تا 12 سال طراحی شد و اندازههای کودکان از نظر قدی و محیطی در بازه مربوط به هر کدام از این دو الگو قرار گرفت و ارتوز بهصورت سفارشیساز و در زمان کمتر و با خطای کمتر آماده شد. طراحی این ارتوز در نرمافزار پیشرفته طراحی لباس مارولوس انجام گرفت (تصویر شماره 3).
مزایای طرح جدید
قابلیت اندازهگیری در دو سایز جهت کودکان 6 تا 12 سال که از لحاظ ارتفاع اندام تحتانی متفاوت هستند و کوتاه شدن فرایند ساخت سفارشی؛ قابلیت تنظیم فشار محیطی از طریق استرپهای ناحیه ران و ساق و برطرف شدن مشکل تنگ یا گشاد بودن ارتوز در طرح قبل؛ پوشیدن و درآوردن راحتتر نسبت به طرح قبل و طرح لباسهای سرهم؛ تسهیل دستشویی رفتن نسبت به طرح قبل و لباس سرهم بهطوری که با باز کردن چسب اتصال قسمت اندام تحتانی به کمر و بدون باز کردن کل ارتوز مسئله دستشویی رفتن رفع شده است.
پس از آماده شدن طرح دوم، مراحل اجرا جهت انجام ارزیابیها آغاز شد. مرحله دوم شامل ارزیابی و اعتبارسنجی ارتوز نهایی با مطالعه تکنمونهای با طرح ترکیبی بهصورت (A-B-BC-A) برای نمونه موردمطالعه بود.
پروتکل مطالعه
فاز پایه (A1) دوره کنترل است. در هر فاز شرکتکننده تحت درمانهای معمول کاردرمانی (تمرینات کاهش اسپاستیسیته، راه رفتن، تمریتات تعادلی، تمرینات هماهنگی دوطرفه، تمرینات مقاومتی و غیره) بهصورت 3 بار در هفته قرار میگرفت و آزمونهای عملکردی ازجمله آزمون 10 متر راه رفتن، تعادل در حین راه رفتن، معیار اشورث جهت ارزیابی اسپاستیسیته همسترینگ راست و چپ و مقیاس عملکرد کاری کانادایی در یک دوره یکماهه، (4 هفتهای) و ارزیابی 2 بار در هفته انجام شد و نتایج ارزیابیها توسط کارشناس ارشد کاردرمانی که در روند مطالعه حضور داشت ثبت شد. پس از فاز پایه، طرح موردنظر دارای دو فاز مداخله بود؛ مداخله اول شامل ارتوز داینامیک حرکتی (B) و مداخله دوم ارتوز داینامیک حرکتی با فنرهای زانو و مچبند (BC) بود که بهطور تصادفی انتخاب شد. نحوه پوشیدن ارتوز در فازهای مداخله بهصورتی بود که جهت پیشگیری از تأثیر پوشیدن کفش و ارتوزها، حداقل 5 ساعت در منزل و در زمانی غیر از زمان خوابیدن و بدون کفش یا صندل پوشیده میشد. محدودیتی در ممتد بودن پوشیدن ارتوز وجود نداشت و تمام آزمونهای عملکردی بدون کفش انجام شد. فاز پس از مداخله (A2) شامل فاز پیگیری بود که طول آن نیز 4 هفته بود و مانند فاز پایه، کودک تحت تمرینات کاردرمانی قرار میگرفت. همچنین هر هفته 2 بار آزمونهای عملکردی انجام شد.
یافتهها
نتایج حاصل از مراحل طراحی ارتوز، به طراحی و ساخت ارتوز داینامیک حرکتی سفارشیساز در دو سایز برای سنین 6 تا 12 سال منجر شد. در بین ارتوزهای داینامیک و بهعبارتی گارمنتها، این ارتوز داینامیک حرکتی اولین و تنها ارتوزی است که در آن از قطعات تقویتکننده داینامیک در مفاصل زانو و مچ استفاده شده است. فنرهای استفادهشده از مفتول استیل با ضخامت 12 میلیمتر هستند. همچنین این فنرها، فنرهای دوبلشده با عرض یک سانتیمتر هستند که نورد شدهاند (تصویر شماره 4).
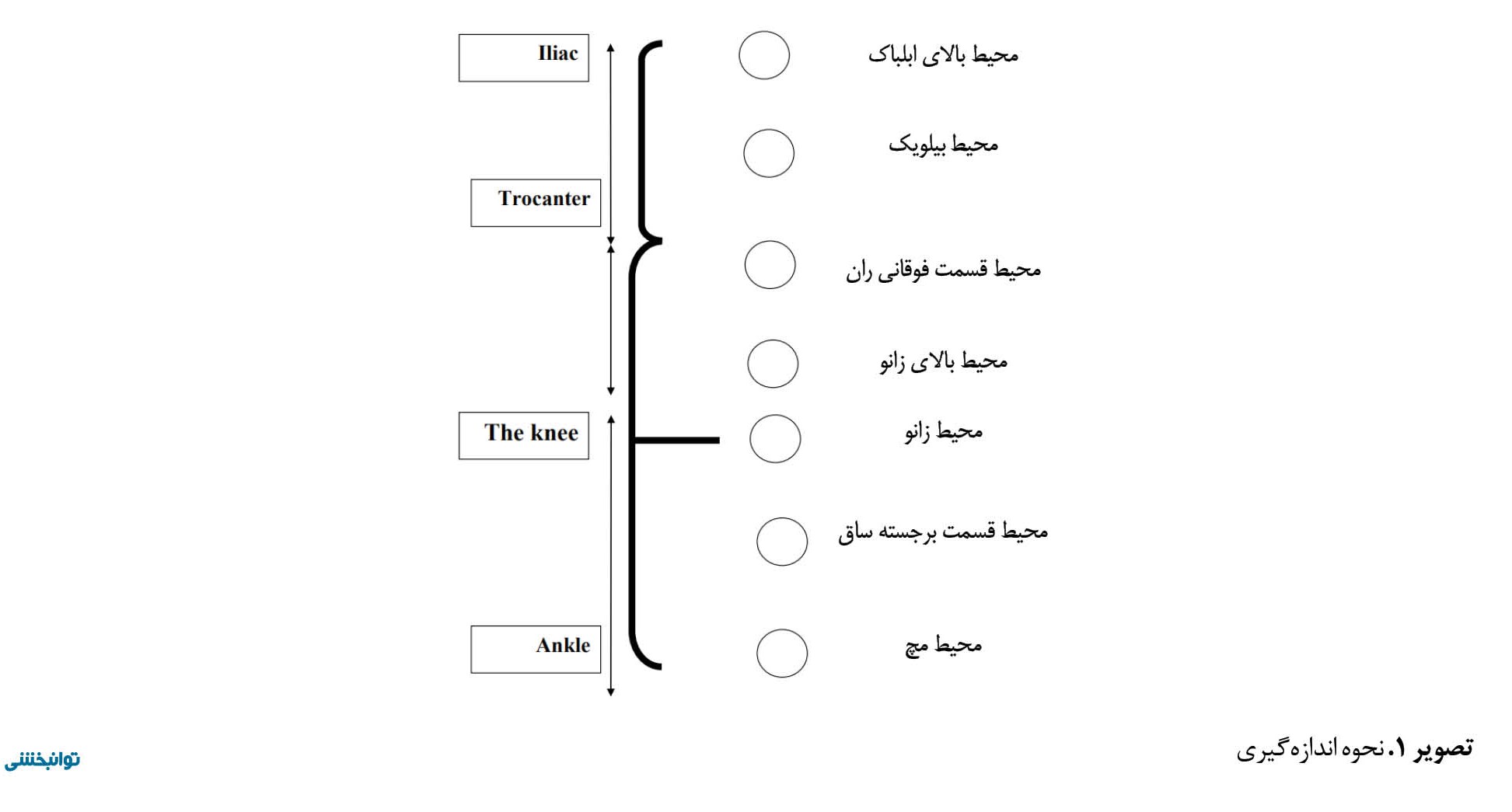
شرکتکننده مطالعه، یک کودک (پسر) 8ساله با سطح II GMFCS E&R، قد 135 سانتیمتر و وزن 50 کیلوگرم بود. سرعت و تعادل در حین راه رفتن با مقیاسهای 10MWT و TUG و تغییرات اسپاستیسیته عضله همسترینگ راست و چپ با معیار اشورث اصلاحشده، در این کودک مورد ارزیابی قرار گرفت. در پایان هر فاز نیز از مقیاس عملکرد کاری کانادایی جهت بررسی عملکرد کاری و رضایت از عملکرد کاری کودک استفاده شد. تصاویر 5، 6 و 7، نمودار سرعت، تعادل و اسپاستیسیته عضله همسترینگ پای راست و چپ کودک را نشان میدهند.
تفسیر اثربخشی مداخلات ارائهشده براساس آماره غیرهمپوشانی دادهها بهترتیب ذیل است:
درصد دادههای غیرهمپوش برابر با 90 درصد مداخلات بسیار اثربخش، 70-90 درصد مداخلات اثربخش، 50-70 درصد ابهام در اثربخشی درمان و کمتر از 50 درصد درمان بیاثر را نشان میدهد. در تفسیر اثربخشی مداخلات نیز به بررسی شاخصهای اندازه اثر کوهن و جی هگز پرداخته شد که براساس مطالعهای مقادیر کمتر از 0/87 اندازه اثر کوچک، مقادیر بین 0/87 و 2/67 اندازه اثر متوسط و مقادیر بالای 2/67 اندازه اثر بزرگ را نشان میدهند [33].
با توجه به تصویر شماره 5، در تحلیل چشمی نمودار سرعت حرکت، ماکزیمم سرعت حرکت در فاز پایه حدود 1/2 متر بر ثانیه است که در فاز مداخله اول (B) تغییری نداشته، اما در فاز مداخله دوم (BC)، روند افزایش ناچیز سرعت قابلمشاهده است و در فاز پیگیری با کاهش و افزایش همراه است.
جدول شماره 1 مقادیر شاخصهای PND و اندازه اثر در متغیر سرعت را نشان میدهد.

در مقایسه فازهای مطالعه براساس شاخص PND، از فاز پایه به مداخله B، در اثربخشی مداخله ابهام وجود دارد (PND=62 درصد) و از فاز پایه به BC مداخله اثربخش بوده است (PND=75 درصد). در مقایسه بقیه فازها، تأثیرگذاری مشاهده نمیشود (50>PND درصد). از فاز B به BC مقدار PND برابر 38 درصد است که با توجه به تحلیل چشمی نمودار مربوطه، نشان میدهد تغییری در اثرگذاری بین دو مداخله وجود ندارد و میزان اثرگذاری بین دو مداخله یکسان است. در بررسی شاخصهای اندازه اثر، در مقایسه فاز پایه به فاز B ،BC و A2، اندازه اثر متوسط مشاهده میشود (2/67>مقدار شاخص >0/87) (جدول شماره 1).
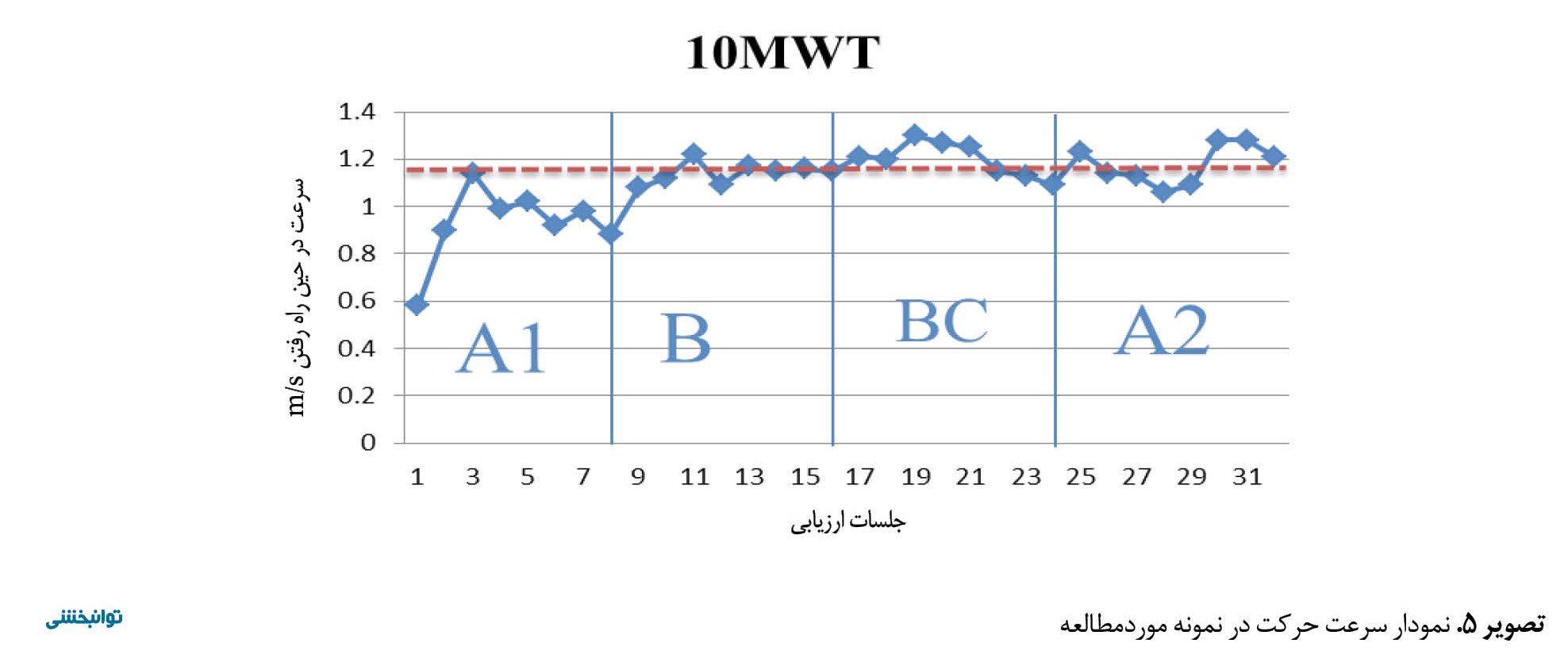
در تحلیل چشمی نمودار تعادل در حین راه رفتن، روند کاهشی زمان مشاهده میشود که در فاز پیگیری ثابت مانده است (تصویر شماره 6). با توجه به جدول شماره 2، مقدار شاخص PND در مقایسه فازهای پایه به مداخله اول و دوم و پیگیری در متغیر تعادل عملکردی، نشاندهنده تأثیرگذاری مداخله است (PND=100 درصد و PND=88 درصد) و در باقی فازها تأثیرگذاری مداخله وجود ندارد (50>PND درصد).
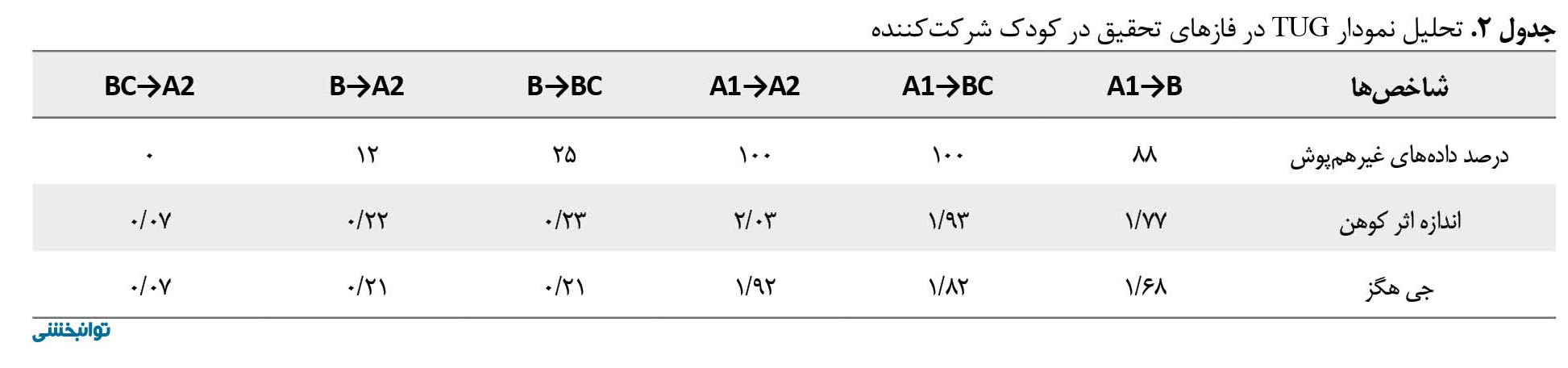
از فاز B به BC مقدار PND برابر 23 درصد است که با توجه به تحلیل چشمی از نمودار نشاندهنده عدم تغییر بین این دو فاز است و هر دو به یک میزان تأثیرگذاری داشتهاند.
در بررسی شاخصهای اندازه اثر کوهن و جی هگز، در فاز پایه به مداخله اول و دوم، اندازه اثر متوسط (مقادیر بالای 0/87 و کمتر از 2/67) و در فاز پایه به فاز پیگیری نیز اندازه اثر متوسط مشاهده میشود که مبین تفاوت قابلتوجه نمرات تعادل بین فاز پایه و مداخله اول، فاز پایه و مداخله دوم و همینطور فاز پایه و پیگیری است (جدول شماره 2).
با توجه به تصویر شماره 7، تحلیل چشمی نمودار اسپاستیسیته عضله همسترینگ راست روند کاهش اسپاستیسیته را در فاز مداخله اول و دوم نشان میدهد (مقدار اسپاستیسیته در فاز پایه 3 بوده که در فازهای مداخله به 2 رسیده است) که در فاز پیگیری مجدداً افزایش اسپاستیسیته به اندازه فاز پایه مشاهده میشود. در پای چپ نیز روند کاهشی اسپاستیسیته در فازهای مداخله مشاهده میشود (مقدار اسپاستیسیته فاز پایه 3 که در فاز مداخله اول به 2 و در فاز مداخله دوم به 1 رسیده است). در فاز پیگیری افزایش اسپاستیسیته مشاهده میشود، اگرچه نسبت به فاز پایه نیز یک واحد کمتر است که نشان میدهد کاهش اسپاستیسیته در فاز پیگیری ثابت مانده است.
در جدول شماره 3 رتبهدهی والدین از عملکرد کاری و رضایت از عملکرد کاری کودک در 4 فعالیت موردنظر والدین آورده شده است.

در تمامی 4 فعالیت ذکرشده، نمره عملکرد کاری و رضایت از عملکرد کاری کودک افزایش داشته است که این افزایش، از فاز پایه به مداخله دوم و فاز پیگیری معنیدار است؛ چراکه اختلاف میانگین عملکرد کاری و رضایت از عملکرد کاری در فاز پایه و فاز BC (مداخله دوم) بیشتر از 2/5 امتیاز است [34].
بحث
تحقیقات در زمینه نحوه کارکرد ارتوزهای داینامیک محدود است. مکانیسم مسئول برای تغییرات در کنترل حرکت توسط ارتوزهای لیکرا و ارتوزهای مشابه، نوروفیزیولوژیکی و بیومکانیکی هستند. حس عمقی، فشار عمیق، ویبریشن و تماس سطحی و اصلاح راستای بیومکانیکی اندام، به افزایش فیدبک حس عمقی منجر شده که وضعیتدهی به اندام و آگاهی از بدن را بهبود میبخشد و باعث بهبود فعالیت عضلانی شده و درنهایت کنترل حرکت را نیز بهبود میبخشد [16]. یکی از مزایای استفاده از این نوع از ارتوزهای داینامیک نسبت به ارتوزهای سخت، مکانیسم نوروفیزیولوژیکی این ارتوزهاست. این ارتوزها با وجود نرم بودن و از نوع لباس بودن بهعلت پذیرش و راحتی بیشتر از سوی کودکان ممکن است نسبت به ارتوزهای سخت بیشتر پوشیده شوند [27]. از مزایای ارتوز این مطالعه، ساخت سفارشی و قابلیت تنظیم در دو سایز، دربر گرفتن اندام تحتانی و سرهم نبودن لباس و دستشویی رفتن راحتتر بدون درآوردن کل لباس است. اما یکی از معایبی که در این ارتوز و ارتوزهای مطالعات دیگر نیز وجود دارد، گرم بودن این ارتوزها در حین استفاده است و البته پوشیدن هر ارتوزی با افزایش دما مواجه است. گرما ممکن است عاملی برای تعدیل تون عضلات اسپاستیک باشد [31].
با توجه به پروتکل مطالعه، 4 هفته اول فاز پیگیری بود که در این فاز، بیمار فقط تمرینات معمول کاردرمانی را دریافت میکرد. فاز دوم، فاز مداخله اول بود که بهمدت 4 هفته ارتوز حرکتی داینامیک، روزانه پوشیده میشد. فاز سوم شامل مداخله دوم با ارتوز حرکتی داینامیک با قطعات فنر و مچبند بود و فاز آخر هم فاز پیگیری بود. با توجه به نتایج مربوط به PND، بهبود سرعت عملکردی در فاز مداخله دوم مشاهده شد، اما در بقیه فازها در اثربخشی ابهام وجود داشت. همچنین در مقایسه دو فاز مداخله، اثرگذاری مشاهده نشد. بنابراین هر دو ارتوز داینامیک در متغیر سرعت در حین راه رفتن، تفاوتی را نشان ندادند که در تحلیل چشمی نمودار نیز مشخص است. در فاز پیگیری، ابهام در ماندگاری اثر وجود داشت. تغییرات افزایشی و کاهشی در فاز پیگیری مشاهده شد. در مطالعهای در سال 2009 [29] که به ارزیابی اثر یک ارتوز الاستومری داینامیک بر سرعت عملکردی کودکان فلج مغزی اسپاستیک دایپلژی از طریق 10MWT پرداخته بود، نتایج مطالعه افزایش سرعت در 5 نمونه از 8 نمونه واردشده به مطالعه را نشان داد. طرح این مطالعه نیز تکنمونهای و بهصورت A-B-A بود. اینکه سرعت در برخی فازهای مداخله افزایش یافته و در برخی فازها، تغییرات در سرعت مشاهده میشود، ممکن است به دو دلیل باشد: اول اینکه کنترلی بر فعالیتهای انجامشده توسط شرکتکننده در دوره مداخله وجود نداشت و دوم اینکه زمان استانداردی برای پوشیدن ارتوز در کودکان وجود نداشت و پیگیری پوشیدن ارتوزها در طول روز از طریق پرسش از والدین انجام میشد و ممکن بود در بعضی روزها ارتوز پوشیده نشود.
در این مطالعه، داده محاسبهشده در تعادل عملکردی، زمان محاسبهشده در یک مسیر رفت و برگشتی بود که از حالت نشسته بر روی یک صندلی به همان حالت برمیگشت. در مقایسه فاز پایه با فاز مداخله اول و دوم (یا ارتوز داینامیک یا ارتوز داینامیک با فنر و مچبند) اثربخشی مداخله وجود داشت و کاهش زمان به معنی بهبود تعادل عملکردی در نمونه موردمطالعه است. در مقایسه فاز پایه با پیگیری نیز اثربخشی ارتوز وجود دارد و میتواند نشانی از ماندگاری اثر در فاز پیگیری باشد. در تحلیل چشمی نمودار نیز مشخص است که اثربخشی مداخلات در فازهای قبلی در فاز پیگیری ثابت باقی مانده است. در بین مطالعاتی که به ارزیابی اثر سوییتها پرداختهاند، دو مطالعه تعادل بعد از استفاده از ارتوزهای مشابه لیکرا را ارزیابی کردهاند که اگرچه ابزار ارزیابی تعادل در این مطالعات متفاوت است، اما نتایج این مطالعات با مطالعه حاضر در بهبود تعادل همخوانی دارد. فلانگان و همکاران در سال 2009 [19] به ارزیابی اثر لیکراگارمنت پوشاننده کل بدن بر تعادل کودکان دارای فلج مغزی با استفاده از آزمون تعادل عملکردی بروننسکی پرداختند. در این مطالعه میانگین نمره تست تعادل عملکردی بروننسکی در فاز مقدماتی 22/4 بوده که پس از 12 هفته به میزان 6/33 افزایش یافته است. بنابراین بررسی خردهآزمون تعادل در آزمون بروننسکی با یک افزایش 15 درصد معنیدار در نظر گرفته شده است. همچنین در این مطالعه، تعادل پس از 2 ماه، 58 درصد و پس از 4 ماه، 76 درصد بهبود یافته است. مطالعه فلانگان با مطالعه حاضر از جهت افزایش تعادل بعد از استفاده از ارتوزهای داینامیک همخوانی دارد. همچنین حسینی و همکاران [35] در مطالعهای در سال 2015 به ارزیابی ارتوز داینامیک نئوپرنی بر کنترل پاسچر با استفاده از یک صفحه نیرو و تعادل عملکردی با استفاده از آزمون برگ پرداختند. در بررسی کنترل پاسچر هیچ تفاوتی بین حالتهای با ارتوز داینامیک و بدون ارتوز مشاهده نشد. در بررسی آزمون تعادل عملکردی برگ نیز افزایش تعادل عملکردی 5 کودک شرکتکننده در مطالعه بعد از 6 هفته استفاده از ارتوز داینامیک گزارش شد که به نظر میرسد ارتوزهای داینامیک در بهبود تعادل مؤثر هستند.
در کودکان مبتلا به فلج مغزی اسپاستیک دایپلژی، عضلات اندام تحتانی درگیر اسپاستیسیته است. مکانیسم احتمالی ارتوزهای داینامیک به این صورت است که از طریق فشار یا کشش بر عضلات اسپاستیک و همینطور تغییر راستای بیومکانیکی اندام تحتانی، باعث تعدیل تون عضلات اسپاستیک میشوند. بنابراین در بررسی اسپاستیسیته عضله همسترینگ، پس از ثابت ماندن مقدار اسپاستیسیته در فاز پایه، در فازهای مداخله در پای راست کاهش یک واحدی و در پای چپ کاهش دو واحد در اسپاستیسیته همسترینگ ایجاد شد که در فاز پیگیری مقدار اسپاستیسیته همسترینگ راست به مقدار اولیه در فاز پایه و میزان اسپاستیسیته همسترینگ چپ به یک واحد کمتر از فاز پایه رسید که نشان میدهد هر دو نوع ارتوز داینامیک حرکتی در زمانی که پوشیده میشوند در تعدیل تون عضله اسپاستیک مؤثر هستند. بنابراین به نظر میرسد تا زمانی که پوشیدن ارتوز ادامه داشته باشد، تون عضلات ممکن است کاهش یابد و این مسئله میتواند باعث بهبود متغیرهای عملکردی همچون سرعت و تعادل که در بخشهای بالا به آنها پرداخته شد، بشود.
در بررسی عملکرد کاری کودک شرکتکننده در مطالعه، افزایش نمرات عملکرد کاری و رضایت از عملکرد کاری کودک در فازهای مداخله، معنیدار بود. مطالعات قبلی نیز افزایش در عملکرد کاری را نشان دادند [19، 36]. در مطالعه فلانگان و همکاران در سال 2009 که به بررسی عملکرد کاری با استفاده از تراتاگ پرداختند، عملکرد کاری و رضایت از عملکرد کاری در ابتدای مطالعه نتایج معنیداری را نشان نداد و تنها پس از 2 ماه استفاده از ارتوز، نتایج رضایت از عملکرد کاری معنیدار شدند [19]. در مطالعه دیگری، نتایج معنیداری در معیار COPM، هم در اثر فوری و هم در پیگیریهای 2 ماه و 4 ماه بعد از مداخله، گزارش شد. همچنین این مطالعه استفاده از معیار COPM را در این گونه مطالعات پیشنهاد کرد [36]. در مطالعهای در سال 2023، میزان ایمن بودن و همینطور میزان فشار وارده توسط یک ارتوز لیکرا به عضلات هایپرتون بازوی کودکان فلج مغزی را بررسی کردند. منظور از ایمن بودن، تعداد و شدت وقایع نامطلوبی ازجمله مشکلات پوستی و فشاری بود که در حین پوشیدن این گارمنتها ممکن بود حاصل شود. در این مطالعه زمان پوشیدن و وقایع نامطلوب احتمالی بهطور روزانه توسط والدین کودک یادداشت میشد. نتایج مطالعه، زمان پوشیدن روزانه ارتوز را خوب و میزان وقایع نامطلوب گزارششده را بسیار کم اعلام کرد [37]. در این مطالعه نیز زمان پوشیدن ارتوز در هر جلسه توسط والدین کودک گزارش شد و عوارض نامطلوب ناشی از ارتوز گزارش نشد.
با توجه به نتایج این مطالعه در کاهش اسپاستیسیته در فازهای مداخله، ممکن است بهبودی در عملکرد کاری و افزایش رضایت از عملکرد کاری به کاهش تونوسیته عضلانی در حین فعالیتها مرتبط باشد. این نتایج همچنین با نتایج کسبشده در سرعت و تعادل نیز همخوانی دارد.
نتیجهگیری
طراحی ارتوز در دو سایز برای سن 6 تا 12 سال، فرایند سفارشیساز بودن این ارتوز را کوتاهتر کرد. به نظر میرسد ارتوز داینامیک طراحیشده در زمانهایی که پوشیده میشود بر تعدیل تونوسیته عضله مؤثر است و باعث بهبود سرعت، تعادل و عملکرد کاری میشود که این پیشرفتها نیز در فعالیتهای روزمره کودک مشخص بود و والدین کودک از عملکرد کودک رضایت داشتند. درمورد تفاوت بین ارتوز با فنر و مچبند و ارتوز بدون فنر و مچبند، در متغیرهای عملکردی و در بازه زمانی در نظر گرفتهشده در این مطالعه تفاوتی حاصل نشد. همچنین این مطالعه نشان میدهد هرچه ارتوز زمان بیشتری پوشیده شود، اثرات مثبت ارتوز بهتر دیده میشود. اما نکته قابلتوجه این است که درمورد ماندگاری اثر ارتوز ابهاماتی وجود دارد.
از محدودیتهای مطالعه میتوان به عدم وجود ماده لیکرا در مطالعات دیگر در ایران و استفاده از ماده مشابه، و عدم وجود مادهای که در عین ایجاد ثبات، دارای منافذی برای عبور هوا جهت حل مسئله گرما در حین پوشیدن باشد، همچنین غیرقابلکنترل بودن دقیق زمان پوشیدن ارتوز در منزل و کم بودن تعداد نمونه اشاره کرد. پیشنهاد میشود این نوع ارتوز در حجم نمونه بیشتر بررسی شود و البته بررسی بیومکانیکی زوایای مفاصل اندام تحتانی در فازهای مختلف راه رفتن صورت گیرد که توسط محققان این مقاله در حال انجام است. با توجه به تعدیل اسپاستیسیته عضله همسترینگ در این مطالعه، پیشنهاد میشود این ارتوز با تغییراتی در طرح، در کودکان دارای فلج مغزی با سطوح بالاتر GMFCS E&R و همینطور در افراد فلج مغزی سنین بالاتر نیز ارزیابی شود.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
مطالعه حاضر موردتأیید کمیته اخلاق دانشگاه علوم توانبخشی و سلامت اجتماعی است ( کد اخلاق : IR.USWR.REC.1399.131). قبل از شروع مطالعه، رضایت شفاهی و کتبی آگاهانه از والدین کودکان فلج مغزی جهت شرکت در مطالعه اخذ شد. کودک و خانواده مختار بودند که در هر مرحله از روند تحقیق از شرکت در پژوهش کنارهگیری کنند. روند پژوهش هیچگونه تداخلی با درمانهای رایج کودک نداشت.
حامی مالی
این مقاله برگرفته از پایاننامه دکترای خانم صدیقه سادات میرباقری در گروه ارتوز و پروتز دانشگاه علوم توانبخشی و سلامت اجتماعی است.
مشارکت نویسندگان
مفهومسازی: محمود بهرامیزاده، غلامرضا امینیان، صدیقه سادات میرباقری؛ روششناسی: غلامرضا امینیان، محسن واحدی، فرزام فرهمند، صدیقه سادات میرباقری؛ تحقیق و بررسی: صدیقه سادات میرباقری؛ منابع: صدیقه سادات میرباقری؛ تحلیل دادهها: فرزام فرهمند، محسن واحدی، حمید دالوند، صدیقه سادات میرباقری؛ نگارش پیشنویس، ویراستاری و نهاییسازی: همه نویسندگان؛ تأمین مالی: صدیقه سادات میرباقری.
تعارض منافع
بنابر اظهار نویسندگان، این مقاله هیچگونه تعارض منافعی ندارد.
تشکر و قدردانی
نویسندگان مقاله مراتب تشکر و قدردانی خود را از شرکت طب و صنعت و همکاری صمیمانه مدیر شرکت جناب آقای مهندس میرمهدی جهت اجرای مراحل ساخت ارتوز اعلام میدارند.
درصد دادههای غیرهمپوش برابر با 90 درصد مداخلات بسیار اثربخش، 70-90 درصد مداخلات اثربخش، 50-70 درصد ابهام در اثربخشی درمان و کمتر از 50 درصد درمان بیاثر را نشان میدهد. در تفسیر اثربخشی مداخلات نیز به بررسی شاخصهای اندازه اثر کوهن و جی هگز پرداخته شد که براساس مطالعهای مقادیر کمتر از 0/87 اندازه اثر کوچک، مقادیر بین 0/87 و 2/67 اندازه اثر متوسط و مقادیر بالای 2/67 اندازه اثر بزرگ را نشان میدهند [33].
با توجه به تصویر شماره 5، در تحلیل چشمی نمودار سرعت حرکت، ماکزیمم سرعت حرکت در فاز پایه حدود 1/2 متر بر ثانیه است که در فاز مداخله اول (B) تغییری نداشته، اما در فاز مداخله دوم (BC)، روند افزایش ناچیز سرعت قابلمشاهده است و در فاز پیگیری با کاهش و افزایش همراه است.
جدول شماره 1 مقادیر شاخصهای PND و اندازه اثر در متغیر سرعت را نشان میدهد.
در مقایسه فازهای مطالعه براساس شاخص PND، از فاز پایه به مداخله B، در اثربخشی مداخله ابهام وجود دارد (PND=62 درصد) و از فاز پایه به BC مداخله اثربخش بوده است (PND=75 درصد). در مقایسه بقیه فازها، تأثیرگذاری مشاهده نمیشود (50>PND درصد). از فاز B به BC مقدار PND برابر 38 درصد است که با توجه به تحلیل چشمی نمودار مربوطه، نشان میدهد تغییری در اثرگذاری بین دو مداخله وجود ندارد و میزان اثرگذاری بین دو مداخله یکسان است. در بررسی شاخصهای اندازه اثر، در مقایسه فاز پایه به فاز B ،BC و A2، اندازه اثر متوسط مشاهده میشود (2/67>مقدار شاخص >0/87) (جدول شماره 1).
در تحلیل چشمی نمودار تعادل در حین راه رفتن، روند کاهشی زمان مشاهده میشود که در فاز پیگیری ثابت مانده است (تصویر شماره 6). با توجه به جدول شماره 2، مقدار شاخص PND در مقایسه فازهای پایه به مداخله اول و دوم و پیگیری در متغیر تعادل عملکردی، نشاندهنده تأثیرگذاری مداخله است (PND=100 درصد و PND=88 درصد) و در باقی فازها تأثیرگذاری مداخله وجود ندارد (50>PND درصد).
از فاز B به BC مقدار PND برابر 23 درصد است که با توجه به تحلیل چشمی از نمودار نشاندهنده عدم تغییر بین این دو فاز است و هر دو به یک میزان تأثیرگذاری داشتهاند.
در بررسی شاخصهای اندازه اثر کوهن و جی هگز، در فاز پایه به مداخله اول و دوم، اندازه اثر متوسط (مقادیر بالای 0/87 و کمتر از 2/67) و در فاز پایه به فاز پیگیری نیز اندازه اثر متوسط مشاهده میشود که مبین تفاوت قابلتوجه نمرات تعادل بین فاز پایه و مداخله اول، فاز پایه و مداخله دوم و همینطور فاز پایه و پیگیری است (جدول شماره 2).
با توجه به تصویر شماره 7، تحلیل چشمی نمودار اسپاستیسیته عضله همسترینگ راست روند کاهش اسپاستیسیته را در فاز مداخله اول و دوم نشان میدهد (مقدار اسپاستیسیته در فاز پایه 3 بوده که در فازهای مداخله به 2 رسیده است) که در فاز پیگیری مجدداً افزایش اسپاستیسیته به اندازه فاز پایه مشاهده میشود. در پای چپ نیز روند کاهشی اسپاستیسیته در فازهای مداخله مشاهده میشود (مقدار اسپاستیسیته فاز پایه 3 که در فاز مداخله اول به 2 و در فاز مداخله دوم به 1 رسیده است). در فاز پیگیری افزایش اسپاستیسیته مشاهده میشود، اگرچه نسبت به فاز پایه نیز یک واحد کمتر است که نشان میدهد کاهش اسپاستیسیته در فاز پیگیری ثابت مانده است.
در جدول شماره 3 رتبهدهی والدین از عملکرد کاری و رضایت از عملکرد کاری کودک در 4 فعالیت موردنظر والدین آورده شده است.
در تمامی 4 فعالیت ذکرشده، نمره عملکرد کاری و رضایت از عملکرد کاری کودک افزایش داشته است که این افزایش، از فاز پایه به مداخله دوم و فاز پیگیری معنیدار است؛ چراکه اختلاف میانگین عملکرد کاری و رضایت از عملکرد کاری در فاز پایه و فاز BC (مداخله دوم) بیشتر از 2/5 امتیاز است [34].
بحث
تحقیقات در زمینه نحوه کارکرد ارتوزهای داینامیک محدود است. مکانیسم مسئول برای تغییرات در کنترل حرکت توسط ارتوزهای لیکرا و ارتوزهای مشابه، نوروفیزیولوژیکی و بیومکانیکی هستند. حس عمقی، فشار عمیق، ویبریشن و تماس سطحی و اصلاح راستای بیومکانیکی اندام، به افزایش فیدبک حس عمقی منجر شده که وضعیتدهی به اندام و آگاهی از بدن را بهبود میبخشد و باعث بهبود فعالیت عضلانی شده و درنهایت کنترل حرکت را نیز بهبود میبخشد [16]. یکی از مزایای استفاده از این نوع از ارتوزهای داینامیک نسبت به ارتوزهای سخت، مکانیسم نوروفیزیولوژیکی این ارتوزهاست. این ارتوزها با وجود نرم بودن و از نوع لباس بودن بهعلت پذیرش و راحتی بیشتر از سوی کودکان ممکن است نسبت به ارتوزهای سخت بیشتر پوشیده شوند [27]. از مزایای ارتوز این مطالعه، ساخت سفارشی و قابلیت تنظیم در دو سایز، دربر گرفتن اندام تحتانی و سرهم نبودن لباس و دستشویی رفتن راحتتر بدون درآوردن کل لباس است. اما یکی از معایبی که در این ارتوز و ارتوزهای مطالعات دیگر نیز وجود دارد، گرم بودن این ارتوزها در حین استفاده است و البته پوشیدن هر ارتوزی با افزایش دما مواجه است. گرما ممکن است عاملی برای تعدیل تون عضلات اسپاستیک باشد [31].
با توجه به پروتکل مطالعه، 4 هفته اول فاز پیگیری بود که در این فاز، بیمار فقط تمرینات معمول کاردرمانی را دریافت میکرد. فاز دوم، فاز مداخله اول بود که بهمدت 4 هفته ارتوز حرکتی داینامیک، روزانه پوشیده میشد. فاز سوم شامل مداخله دوم با ارتوز حرکتی داینامیک با قطعات فنر و مچبند بود و فاز آخر هم فاز پیگیری بود. با توجه به نتایج مربوط به PND، بهبود سرعت عملکردی در فاز مداخله دوم مشاهده شد، اما در بقیه فازها در اثربخشی ابهام وجود داشت. همچنین در مقایسه دو فاز مداخله، اثرگذاری مشاهده نشد. بنابراین هر دو ارتوز داینامیک در متغیر سرعت در حین راه رفتن، تفاوتی را نشان ندادند که در تحلیل چشمی نمودار نیز مشخص است. در فاز پیگیری، ابهام در ماندگاری اثر وجود داشت. تغییرات افزایشی و کاهشی در فاز پیگیری مشاهده شد. در مطالعهای در سال 2009 [29] که به ارزیابی اثر یک ارتوز الاستومری داینامیک بر سرعت عملکردی کودکان فلج مغزی اسپاستیک دایپلژی از طریق 10MWT پرداخته بود، نتایج مطالعه افزایش سرعت در 5 نمونه از 8 نمونه واردشده به مطالعه را نشان داد. طرح این مطالعه نیز تکنمونهای و بهصورت A-B-A بود. اینکه سرعت در برخی فازهای مداخله افزایش یافته و در برخی فازها، تغییرات در سرعت مشاهده میشود، ممکن است به دو دلیل باشد: اول اینکه کنترلی بر فعالیتهای انجامشده توسط شرکتکننده در دوره مداخله وجود نداشت و دوم اینکه زمان استانداردی برای پوشیدن ارتوز در کودکان وجود نداشت و پیگیری پوشیدن ارتوزها در طول روز از طریق پرسش از والدین انجام میشد و ممکن بود در بعضی روزها ارتوز پوشیده نشود.
در این مطالعه، داده محاسبهشده در تعادل عملکردی، زمان محاسبهشده در یک مسیر رفت و برگشتی بود که از حالت نشسته بر روی یک صندلی به همان حالت برمیگشت. در مقایسه فاز پایه با فاز مداخله اول و دوم (یا ارتوز داینامیک یا ارتوز داینامیک با فنر و مچبند) اثربخشی مداخله وجود داشت و کاهش زمان به معنی بهبود تعادل عملکردی در نمونه موردمطالعه است. در مقایسه فاز پایه با پیگیری نیز اثربخشی ارتوز وجود دارد و میتواند نشانی از ماندگاری اثر در فاز پیگیری باشد. در تحلیل چشمی نمودار نیز مشخص است که اثربخشی مداخلات در فازهای قبلی در فاز پیگیری ثابت باقی مانده است. در بین مطالعاتی که به ارزیابی اثر سوییتها پرداختهاند، دو مطالعه تعادل بعد از استفاده از ارتوزهای مشابه لیکرا را ارزیابی کردهاند که اگرچه ابزار ارزیابی تعادل در این مطالعات متفاوت است، اما نتایج این مطالعات با مطالعه حاضر در بهبود تعادل همخوانی دارد. فلانگان و همکاران در سال 2009 [19] به ارزیابی اثر لیکراگارمنت پوشاننده کل بدن بر تعادل کودکان دارای فلج مغزی با استفاده از آزمون تعادل عملکردی بروننسکی پرداختند. در این مطالعه میانگین نمره تست تعادل عملکردی بروننسکی در فاز مقدماتی 22/4 بوده که پس از 12 هفته به میزان 6/33 افزایش یافته است. بنابراین بررسی خردهآزمون تعادل در آزمون بروننسکی با یک افزایش 15 درصد معنیدار در نظر گرفته شده است. همچنین در این مطالعه، تعادل پس از 2 ماه، 58 درصد و پس از 4 ماه، 76 درصد بهبود یافته است. مطالعه فلانگان با مطالعه حاضر از جهت افزایش تعادل بعد از استفاده از ارتوزهای داینامیک همخوانی دارد. همچنین حسینی و همکاران [35] در مطالعهای در سال 2015 به ارزیابی ارتوز داینامیک نئوپرنی بر کنترل پاسچر با استفاده از یک صفحه نیرو و تعادل عملکردی با استفاده از آزمون برگ پرداختند. در بررسی کنترل پاسچر هیچ تفاوتی بین حالتهای با ارتوز داینامیک و بدون ارتوز مشاهده نشد. در بررسی آزمون تعادل عملکردی برگ نیز افزایش تعادل عملکردی 5 کودک شرکتکننده در مطالعه بعد از 6 هفته استفاده از ارتوز داینامیک گزارش شد که به نظر میرسد ارتوزهای داینامیک در بهبود تعادل مؤثر هستند.
در کودکان مبتلا به فلج مغزی اسپاستیک دایپلژی، عضلات اندام تحتانی درگیر اسپاستیسیته است. مکانیسم احتمالی ارتوزهای داینامیک به این صورت است که از طریق فشار یا کشش بر عضلات اسپاستیک و همینطور تغییر راستای بیومکانیکی اندام تحتانی، باعث تعدیل تون عضلات اسپاستیک میشوند. بنابراین در بررسی اسپاستیسیته عضله همسترینگ، پس از ثابت ماندن مقدار اسپاستیسیته در فاز پایه، در فازهای مداخله در پای راست کاهش یک واحدی و در پای چپ کاهش دو واحد در اسپاستیسیته همسترینگ ایجاد شد که در فاز پیگیری مقدار اسپاستیسیته همسترینگ راست به مقدار اولیه در فاز پایه و میزان اسپاستیسیته همسترینگ چپ به یک واحد کمتر از فاز پایه رسید که نشان میدهد هر دو نوع ارتوز داینامیک حرکتی در زمانی که پوشیده میشوند در تعدیل تون عضله اسپاستیک مؤثر هستند. بنابراین به نظر میرسد تا زمانی که پوشیدن ارتوز ادامه داشته باشد، تون عضلات ممکن است کاهش یابد و این مسئله میتواند باعث بهبود متغیرهای عملکردی همچون سرعت و تعادل که در بخشهای بالا به آنها پرداخته شد، بشود.
در بررسی عملکرد کاری کودک شرکتکننده در مطالعه، افزایش نمرات عملکرد کاری و رضایت از عملکرد کاری کودک در فازهای مداخله، معنیدار بود. مطالعات قبلی نیز افزایش در عملکرد کاری را نشان دادند [19، 36]. در مطالعه فلانگان و همکاران در سال 2009 که به بررسی عملکرد کاری با استفاده از تراتاگ پرداختند، عملکرد کاری و رضایت از عملکرد کاری در ابتدای مطالعه نتایج معنیداری را نشان نداد و تنها پس از 2 ماه استفاده از ارتوز، نتایج رضایت از عملکرد کاری معنیدار شدند [19]. در مطالعه دیگری، نتایج معنیداری در معیار COPM، هم در اثر فوری و هم در پیگیریهای 2 ماه و 4 ماه بعد از مداخله، گزارش شد. همچنین این مطالعه استفاده از معیار COPM را در این گونه مطالعات پیشنهاد کرد [36]. در مطالعهای در سال 2023، میزان ایمن بودن و همینطور میزان فشار وارده توسط یک ارتوز لیکرا به عضلات هایپرتون بازوی کودکان فلج مغزی را بررسی کردند. منظور از ایمن بودن، تعداد و شدت وقایع نامطلوبی ازجمله مشکلات پوستی و فشاری بود که در حین پوشیدن این گارمنتها ممکن بود حاصل شود. در این مطالعه زمان پوشیدن و وقایع نامطلوب احتمالی بهطور روزانه توسط والدین کودک یادداشت میشد. نتایج مطالعه، زمان پوشیدن روزانه ارتوز را خوب و میزان وقایع نامطلوب گزارششده را بسیار کم اعلام کرد [37]. در این مطالعه نیز زمان پوشیدن ارتوز در هر جلسه توسط والدین کودک گزارش شد و عوارض نامطلوب ناشی از ارتوز گزارش نشد.
با توجه به نتایج این مطالعه در کاهش اسپاستیسیته در فازهای مداخله، ممکن است بهبودی در عملکرد کاری و افزایش رضایت از عملکرد کاری به کاهش تونوسیته عضلانی در حین فعالیتها مرتبط باشد. این نتایج همچنین با نتایج کسبشده در سرعت و تعادل نیز همخوانی دارد.
نتیجهگیری
طراحی ارتوز در دو سایز برای سن 6 تا 12 سال، فرایند سفارشیساز بودن این ارتوز را کوتاهتر کرد. به نظر میرسد ارتوز داینامیک طراحیشده در زمانهایی که پوشیده میشود بر تعدیل تونوسیته عضله مؤثر است و باعث بهبود سرعت، تعادل و عملکرد کاری میشود که این پیشرفتها نیز در فعالیتهای روزمره کودک مشخص بود و والدین کودک از عملکرد کودک رضایت داشتند. درمورد تفاوت بین ارتوز با فنر و مچبند و ارتوز بدون فنر و مچبند، در متغیرهای عملکردی و در بازه زمانی در نظر گرفتهشده در این مطالعه تفاوتی حاصل نشد. همچنین این مطالعه نشان میدهد هرچه ارتوز زمان بیشتری پوشیده شود، اثرات مثبت ارتوز بهتر دیده میشود. اما نکته قابلتوجه این است که درمورد ماندگاری اثر ارتوز ابهاماتی وجود دارد.
از محدودیتهای مطالعه میتوان به عدم وجود ماده لیکرا در مطالعات دیگر در ایران و استفاده از ماده مشابه، و عدم وجود مادهای که در عین ایجاد ثبات، دارای منافذی برای عبور هوا جهت حل مسئله گرما در حین پوشیدن باشد، همچنین غیرقابلکنترل بودن دقیق زمان پوشیدن ارتوز در منزل و کم بودن تعداد نمونه اشاره کرد. پیشنهاد میشود این نوع ارتوز در حجم نمونه بیشتر بررسی شود و البته بررسی بیومکانیکی زوایای مفاصل اندام تحتانی در فازهای مختلف راه رفتن صورت گیرد که توسط محققان این مقاله در حال انجام است. با توجه به تعدیل اسپاستیسیته عضله همسترینگ در این مطالعه، پیشنهاد میشود این ارتوز با تغییراتی در طرح، در کودکان دارای فلج مغزی با سطوح بالاتر GMFCS E&R و همینطور در افراد فلج مغزی سنین بالاتر نیز ارزیابی شود.
ملاحظات اخلاقی
پیروی از اصول اخلاق پژوهش
مطالعه حاضر موردتأیید کمیته اخلاق دانشگاه علوم توانبخشی و سلامت اجتماعی است ( کد اخلاق : IR.USWR.REC.1399.131). قبل از شروع مطالعه، رضایت شفاهی و کتبی آگاهانه از والدین کودکان فلج مغزی جهت شرکت در مطالعه اخذ شد. کودک و خانواده مختار بودند که در هر مرحله از روند تحقیق از شرکت در پژوهش کنارهگیری کنند. روند پژوهش هیچگونه تداخلی با درمانهای رایج کودک نداشت.
حامی مالی
این مقاله برگرفته از پایاننامه دکترای خانم صدیقه سادات میرباقری در گروه ارتوز و پروتز دانشگاه علوم توانبخشی و سلامت اجتماعی است.
مشارکت نویسندگان
مفهومسازی: محمود بهرامیزاده، غلامرضا امینیان، صدیقه سادات میرباقری؛ روششناسی: غلامرضا امینیان، محسن واحدی، فرزام فرهمند، صدیقه سادات میرباقری؛ تحقیق و بررسی: صدیقه سادات میرباقری؛ منابع: صدیقه سادات میرباقری؛ تحلیل دادهها: فرزام فرهمند، محسن واحدی، حمید دالوند، صدیقه سادات میرباقری؛ نگارش پیشنویس، ویراستاری و نهاییسازی: همه نویسندگان؛ تأمین مالی: صدیقه سادات میرباقری.
تعارض منافع
بنابر اظهار نویسندگان، این مقاله هیچگونه تعارض منافعی ندارد.
تشکر و قدردانی
نویسندگان مقاله مراتب تشکر و قدردانی خود را از شرکت طب و صنعت و همکاری صمیمانه مدیر شرکت جناب آقای مهندس میرمهدی جهت اجرای مراحل ساخت ارتوز اعلام میدارند.
References
1.Shevell M. Cerebral palsy to cerebral palsy spectrum disorder: Time for a name change? Neurology. 2019; 92(5):233-5.[DOI:10.1212/WNL.0000000000006747] [PMID]
2.Graham HK, Rosenbaum P, Paneth N, Dan B, Lin JP, Damiano DL, et al. Cerebral palsy. Nature Reviews. Disease Primers. 2016; 2:15082.[DOI:10.1038/nrdp.2015.82] [PMID] [PMCID]
3.Joghataei M, Kazem M. Assessment the level of community needs in welfare services on the whole country. Tehran: University of Social Welfare and Rehabilitation Sciences; 1990. [Link]
4.Ferdjallah M, Harris GF, Smith P, Wertsch JJ. Analysis of postural control synergies during quiet standing in healthy children and children with cerebral palsy. Clinical Biomechanics. 2002; 17(3):203-10. [DOI:10.1016/S0268-0033(01)00121-8] [PMID]
5.Moreau NG, Bodkin AW, Bjornson K, Hobbs A, Soileau M, Lahasky K. Effectiveness of rehabilitation interventions to improve gait speed in children with cerebral palsy: Systematic review and meta-analysis. Physical Therapy. 2016; 96(12):1938-54. [DOI:10.2522/ptj.20150401] [PMID] [PMCID]
6.Bjornson KF, Zhou C, Stevenson RD, Christakis D. Relation of stride activity and participation in mobility-based life habits among children with cerebral palsy. Archives of Physical Medicine and Rehabilitation. 2014; 95(2):360-8. [DOI:10.1016/j.apmr.2013.10.022] [PMID] [PMCID]
7.Rodda JM, Graham HK, Carson L, Galea MP, Wolfe R. Sagittal gait patterns in spastic diplegia. The Journal of Bone and Joint Surgery. British Volume. 2004; 86(2):251-8. [DOI:10.1302/0301-620X.86B2.13878] [PMID]
8.Chambers HG. Treatment of functional limitations at the knee in ambulatory children with cerebral palsy. European Journal of Neurology. 2001; 8(Suppl 5):59-74. [DOI:10.1046/j.1468-1331.2001.00039.x] [PMID]
9.Steele KM, Demers MS, Schwartz MH, Delp SL. Compressive tibiofemoral force during crouch gait. Gait & Posture. 2012; 35(4):556-60. [DOI:10.1016/j.gaitpost.2011.11.023] [PMID] [PMCID]
10.Perry J, Antonelli D, Ford W. Analysis of knee-joint forces during flexed-knee stance. Journal of Bone and Joint Surgery. American Volume. 1975; 57(7):961-7. [DOI:10.2106/00004623-197557070-00014] [PMID]
11.Rethlefsen SA, Nguyen DT, Wren TA, Milewski MD, Kay RM. Knee pain and patellofemoral symptoms in patients with cerebral palsy. Journal of Pediatric Orthopedics. 2015; 35(5):519-22. [DOI:10.1097/BPO.0000000000000304] [PMID]
12.Bell KJ, Ounpuu S, DeLuca PA, Romness MJ. Natural progression of gait in children with cerebral palsy. Journal of Pediatric Orthopedics. 2002; 22(5):677-82. [DOI:10.1097/01241398-200209000-00020] [PMID]
13.Galey SA, Lerner ZF, Bulea TC, Zimbler S, Damiano DL. Effectiveness of surgical and non-surgical management of crouch gait in cerebral palsy: A systematic review. Gait & Posture. 2017; 54:93-105. [DOI:10.1016/j.gaitpost.2017.02.024] [PMID] [PMCID]
14.Rogozinski BM, Davids JR, Davis RB 3rd, Jameson GG, Blackhurst DW. The efficacy of the floor-reaction ankle-foot orthosis in children with cerebral palsy. The Journal of Bone and Joint Surgery. American Volume. 2009; 91(10):2440-7. [DOI:10.2106/JBJS.H.00965] [PMID]
15.Abd El-Kafy EM. The clinical impact of orthotic correction of lower limb rotational deformities in children with cerebral palsy: A randomized controlled trial. Clinical Rehabilitation. 2014; 28(10):1004-14. [DOI:10.1177/0269215514533710] [PMID]
16.Hylton N, Allen C. The development and use of SPIO lycra compression bracing in children with neuromotor deficits. Pediatric Rehabilitation. 1997; 1(2):109-16. [DOI:10.3109/17518429709025853] [PMID]
17.Harris SR. A study of a dynamic proximal stability splint in the management of children with cerebral palsy. Developmental Medicine and Child Neurology. 1996; 38(2):181-3. [PMID]
18.Rennie DJ, Attfield SF, Morton RE, Polak FJ, Nicholson J. An evaluation of lycra garments in the lower limb using 3-D gait analysis and functional assessment (PEDI). Gait & Posture. 2000; 12(1):1-6. [DOI:10.1016/S0966-6362(00)00066-7] [PMID]
19.Flanagan A, Krzak J, Peer M, Johnson P, Urban M. Evaluation of short-term intensive orthotic garment use in children who have cerebral palsy. Pediatric Physical Therapy. 2009; 21(2):201-4.[DOI:10.1097/PEP.0b013e3181a347ab] [PMID]
20.Blair E, Ballantyne J, Horsman S, Chauvel P. A study of a dynamic proximal stability splint in the management of children with cerebral palsy. Developmental Medicine and Child Neurology. 1995; 37(6):544-54. [DOI:10.1111/j.1469-8749.1995.tb12041.x] [PMID]
21.Gerard A, Toussaint-Thorin M, Mohammad Y, Letellier G, Fritot S, Masson S, et al. Propensix: Pressure garment therapy using compressive dynamic Lycra® sleeve to improve bi-manual performance in unilateral cerebral palsy: A multicenter randomized controlled trial protocol. Trials. 2022; 23(1):117. [DOI:10.1186/s13063-022-06041-1] [PMID] [PMCID]
22.Serrao M, Casali C, Ranavolo A, Mari S, Conte C, Chini G, et al. Use of dynamic movement orthoses to improve gait stability and trunk control in ataxic patients. European Journal of Physical and Rehabilitation Medicine. 2017; 53(5):735-43. [Link]
23.Watson MJ, Crosby P, Matthews M. An evaluation of the effects of a dynamic lycra orthosis on arm function in a late stage patient with acquired brain injury. Brain Injury. 2007; 21(7):753-61. [DOI:10.1080/02699050701481613] [PMID]
24.Attard J, Rithalia S. Physiological effects of lycra® pressure garments on children with cerebral palsy. In: Anand SC, M Kennedy JF, Miraftab M, Rajendran S, editors. edical and Healthcare Textiles: A volume in Woodhead Publishing Series in Textiles. Amsterdam: Elsevier; 2010. [DOI:10.1533/9780857090348.300]
25.Indurkar I, Chaudhary NI, Chaudhary S, Sheikh MK, Gawande U. A case study on the use of theratogs® with conventional physiotherapy on a child with cerebral palsy, GMFCS level V. Journal of Survey in Fisheries Sciences. 2023; 10(4S):3082-7. [DOI:10.53555/sfs.v10i4S.1885]
26.Civil DA. Design and development of a soft pediatric support garment for ankle-foot orthoses wearers [master thesis]. Newark: University of Delaware; 2019. [Link]
27.Stone KA. Dynamic elastomeric fabric orthoses (defo) and physiotherapy after botulinum toxin (BT) in adults with focal spasticity: A feasibility study using mixed methods [doctoral dissertation]. Exeter: University of Exeter; 2014. [Link]
28.Bahramizadeh M, Rassafiani M, Aminian G, Rashedi V, Farmani F, Mirbagheri SS. Effect of dynamic elastomeric fabric orthoses on postural control in children with cerebral palsy. Pediatric Physical Therapy. 2015; 27(4):349-54. [DOI:10.1097/PEP.0000000000000171] [PMID]
29.Matthews MJ, Watson M, Richardson B. Effects of dynamic elastomeric fabric orthoses on children with cerebral palsy. Prosthetics and Orthotics International. 2009; 33(4):339-47. [DOI:10.3109/03093640903150287] [PMID]
30.Knox V. The use of lycra garments in children with cerebral palsy: A report of a descriptive clinical trial. British Journal of Occupational Therapy. 2003; 66(2):71-7. [DOI:10.1177/030802260306600205]
31.Kerem M, Livanelioglu A, Topcu M. Effects of Johnstone pressure splints combined with neurodevelopmental therapy on spasticity and cutaneous sensory inputs in spastic cerebral palsy. Developmental Medicine and Child Neurology. 2001; 43(5):307-13. [DOI:10.1017/S0012162201000585] [PMID]
32.Gunel MK, Mutlu A, Tarsuslu T, Livanelioglu A. Relationship among the manual ability classification system (MACS), the gross motor function classification system (GMFCS), and the functional status (WeeFIM) in children with spastic cerebral palsy. European Journal of Pediatrics. 2009; 168(4):477-85. [DOI:10.1007/s00431-008-0775-1] [PMID]
33.Bloom M, Fischer J, Orme JG. Evaluating practice: Guidelines for the accountable professional. Boston: Pearson/Allyn and Bacon; 2006. [Link]
34.Law MC, Canadian Association of Occupational Therapists. Canadian occupational performance measure. Ottawa: Canadian Association of Occupational Therapists; 1998. [Link]
35.Hosseini M, Mirbagheri SS, Bahramizadeh M, Rassaffiani M, Torkeman R. [The effect of neoprene dynamic orthosis on postural control in children with cerebral palsy (pilot study) (Persian)]. Journal of Modern Rehabilitation. 2015; 9(2):69-76. [Link]
36.Christy JB, Chapman CG, Murphy P. The effect of intense physical therapy for children with cerebral palsy. Journal of Pediatric Rehabilitation Medicine. 2012; 5(3):159-70. [DOI:10.3233/PRM-2012-0208] [PMID]
37.Béghin L, Mohammad Y, Fritot S, Letellier G, Masson S, Zagamé Y, et al. Safety and adherence of pressure garment therapy in children with upper limb unilateral cerebral palsy. Results from a randomized clinical trial ancillary analysis. Frontiers in Pediatrics. 2023; 11:1043350. [DOI:10.3389/fped.2023.1043350] [PMID] [PMCID]
1.Shevell M. Cerebral palsy to cerebral palsy spectrum disorder: Time for a name change? Neurology. 2019; 92(5):233-5.[DOI:10.1212/WNL.0000000000006747] [PMID]
2.Graham HK, Rosenbaum P, Paneth N, Dan B, Lin JP, Damiano DL, et al. Cerebral palsy. Nature Reviews. Disease Primers. 2016; 2:15082.[DOI:10.1038/nrdp.2015.82] [PMID] [PMCID]
3.Joghataei M, Kazem M. Assessment the level of community needs in welfare services on the whole country. Tehran: University of Social Welfare and Rehabilitation Sciences; 1990. [Link]
4.Ferdjallah M, Harris GF, Smith P, Wertsch JJ. Analysis of postural control synergies during quiet standing in healthy children and children with cerebral palsy. Clinical Biomechanics. 2002; 17(3):203-10. [DOI:10.1016/S0268-0033(01)00121-8] [PMID]
5.Moreau NG, Bodkin AW, Bjornson K, Hobbs A, Soileau M, Lahasky K. Effectiveness of rehabilitation interventions to improve gait speed in children with cerebral palsy: Systematic review and meta-analysis. Physical Therapy. 2016; 96(12):1938-54. [DOI:10.2522/ptj.20150401] [PMID] [PMCID]
6.Bjornson KF, Zhou C, Stevenson RD, Christakis D. Relation of stride activity and participation in mobility-based life habits among children with cerebral palsy. Archives of Physical Medicine and Rehabilitation. 2014; 95(2):360-8. [DOI:10.1016/j.apmr.2013.10.022] [PMID] [PMCID]
7.Rodda JM, Graham HK, Carson L, Galea MP, Wolfe R. Sagittal gait patterns in spastic diplegia. The Journal of Bone and Joint Surgery. British Volume. 2004; 86(2):251-8. [DOI:10.1302/0301-620X.86B2.13878] [PMID]
8.Chambers HG. Treatment of functional limitations at the knee in ambulatory children with cerebral palsy. European Journal of Neurology. 2001; 8(Suppl 5):59-74. [DOI:10.1046/j.1468-1331.2001.00039.x] [PMID]
9.Steele KM, Demers MS, Schwartz MH, Delp SL. Compressive tibiofemoral force during crouch gait. Gait & Posture. 2012; 35(4):556-60. [DOI:10.1016/j.gaitpost.2011.11.023] [PMID] [PMCID]
10.Perry J, Antonelli D, Ford W. Analysis of knee-joint forces during flexed-knee stance. Journal of Bone and Joint Surgery. American Volume. 1975; 57(7):961-7. [DOI:10.2106/00004623-197557070-00014] [PMID]
11.Rethlefsen SA, Nguyen DT, Wren TA, Milewski MD, Kay RM. Knee pain and patellofemoral symptoms in patients with cerebral palsy. Journal of Pediatric Orthopedics. 2015; 35(5):519-22. [DOI:10.1097/BPO.0000000000000304] [PMID]
12.Bell KJ, Ounpuu S, DeLuca PA, Romness MJ. Natural progression of gait in children with cerebral palsy. Journal of Pediatric Orthopedics. 2002; 22(5):677-82. [DOI:10.1097/01241398-200209000-00020] [PMID]
13.Galey SA, Lerner ZF, Bulea TC, Zimbler S, Damiano DL. Effectiveness of surgical and non-surgical management of crouch gait in cerebral palsy: A systematic review. Gait & Posture. 2017; 54:93-105. [DOI:10.1016/j.gaitpost.2017.02.024] [PMID] [PMCID]
14.Rogozinski BM, Davids JR, Davis RB 3rd, Jameson GG, Blackhurst DW. The efficacy of the floor-reaction ankle-foot orthosis in children with cerebral palsy. The Journal of Bone and Joint Surgery. American Volume. 2009; 91(10):2440-7. [DOI:10.2106/JBJS.H.00965] [PMID]
15.Abd El-Kafy EM. The clinical impact of orthotic correction of lower limb rotational deformities in children with cerebral palsy: A randomized controlled trial. Clinical Rehabilitation. 2014; 28(10):1004-14. [DOI:10.1177/0269215514533710] [PMID]
16.Hylton N, Allen C. The development and use of SPIO lycra compression bracing in children with neuromotor deficits. Pediatric Rehabilitation. 1997; 1(2):109-16. [DOI:10.3109/17518429709025853] [PMID]
17.Harris SR. A study of a dynamic proximal stability splint in the management of children with cerebral palsy. Developmental Medicine and Child Neurology. 1996; 38(2):181-3. [PMID]
18.Rennie DJ, Attfield SF, Morton RE, Polak FJ, Nicholson J. An evaluation of lycra garments in the lower limb using 3-D gait analysis and functional assessment (PEDI). Gait & Posture. 2000; 12(1):1-6. [DOI:10.1016/S0966-6362(00)00066-7] [PMID]
19.Flanagan A, Krzak J, Peer M, Johnson P, Urban M. Evaluation of short-term intensive orthotic garment use in children who have cerebral palsy. Pediatric Physical Therapy. 2009; 21(2):201-4.[DOI:10.1097/PEP.0b013e3181a347ab] [PMID]
20.Blair E, Ballantyne J, Horsman S, Chauvel P. A study of a dynamic proximal stability splint in the management of children with cerebral palsy. Developmental Medicine and Child Neurology. 1995; 37(6):544-54. [DOI:10.1111/j.1469-8749.1995.tb12041.x] [PMID]
21.Gerard A, Toussaint-Thorin M, Mohammad Y, Letellier G, Fritot S, Masson S, et al. Propensix: Pressure garment therapy using compressive dynamic Lycra® sleeve to improve bi-manual performance in unilateral cerebral palsy: A multicenter randomized controlled trial protocol. Trials. 2022; 23(1):117. [DOI:10.1186/s13063-022-06041-1] [PMID] [PMCID]
22.Serrao M, Casali C, Ranavolo A, Mari S, Conte C, Chini G, et al. Use of dynamic movement orthoses to improve gait stability and trunk control in ataxic patients. European Journal of Physical and Rehabilitation Medicine. 2017; 53(5):735-43. [Link]
23.Watson MJ, Crosby P, Matthews M. An evaluation of the effects of a dynamic lycra orthosis on arm function in a late stage patient with acquired brain injury. Brain Injury. 2007; 21(7):753-61. [DOI:10.1080/02699050701481613] [PMID]
24.Attard J, Rithalia S. Physiological effects of lycra® pressure garments on children with cerebral palsy. In: Anand SC, M Kennedy JF, Miraftab M, Rajendran S, editors. edical and Healthcare Textiles: A volume in Woodhead Publishing Series in Textiles. Amsterdam: Elsevier; 2010. [DOI:10.1533/9780857090348.300]
25.Indurkar I, Chaudhary NI, Chaudhary S, Sheikh MK, Gawande U. A case study on the use of theratogs® with conventional physiotherapy on a child with cerebral palsy, GMFCS level V. Journal of Survey in Fisheries Sciences. 2023; 10(4S):3082-7. [DOI:10.53555/sfs.v10i4S.1885]
26.Civil DA. Design and development of a soft pediatric support garment for ankle-foot orthoses wearers [master thesis]. Newark: University of Delaware; 2019. [Link]
27.Stone KA. Dynamic elastomeric fabric orthoses (defo) and physiotherapy after botulinum toxin (BT) in adults with focal spasticity: A feasibility study using mixed methods [doctoral dissertation]. Exeter: University of Exeter; 2014. [Link]
28.Bahramizadeh M, Rassafiani M, Aminian G, Rashedi V, Farmani F, Mirbagheri SS. Effect of dynamic elastomeric fabric orthoses on postural control in children with cerebral palsy. Pediatric Physical Therapy. 2015; 27(4):349-54. [DOI:10.1097/PEP.0000000000000171] [PMID]
29.Matthews MJ, Watson M, Richardson B. Effects of dynamic elastomeric fabric orthoses on children with cerebral palsy. Prosthetics and Orthotics International. 2009; 33(4):339-47. [DOI:10.3109/03093640903150287] [PMID]
30.Knox V. The use of lycra garments in children with cerebral palsy: A report of a descriptive clinical trial. British Journal of Occupational Therapy. 2003; 66(2):71-7. [DOI:10.1177/030802260306600205]
31.Kerem M, Livanelioglu A, Topcu M. Effects of Johnstone pressure splints combined with neurodevelopmental therapy on spasticity and cutaneous sensory inputs in spastic cerebral palsy. Developmental Medicine and Child Neurology. 2001; 43(5):307-13. [DOI:10.1017/S0012162201000585] [PMID]
32.Gunel MK, Mutlu A, Tarsuslu T, Livanelioglu A. Relationship among the manual ability classification system (MACS), the gross motor function classification system (GMFCS), and the functional status (WeeFIM) in children with spastic cerebral palsy. European Journal of Pediatrics. 2009; 168(4):477-85. [DOI:10.1007/s00431-008-0775-1] [PMID]
33.Bloom M, Fischer J, Orme JG. Evaluating practice: Guidelines for the accountable professional. Boston: Pearson/Allyn and Bacon; 2006. [Link]
34.Law MC, Canadian Association of Occupational Therapists. Canadian occupational performance measure. Ottawa: Canadian Association of Occupational Therapists; 1998. [Link]
35.Hosseini M, Mirbagheri SS, Bahramizadeh M, Rassaffiani M, Torkeman R. [The effect of neoprene dynamic orthosis on postural control in children with cerebral palsy (pilot study) (Persian)]. Journal of Modern Rehabilitation. 2015; 9(2):69-76. [Link]
36.Christy JB, Chapman CG, Murphy P. The effect of intense physical therapy for children with cerebral palsy. Journal of Pediatric Rehabilitation Medicine. 2012; 5(3):159-70. [DOI:10.3233/PRM-2012-0208] [PMID]
37.Béghin L, Mohammad Y, Fritot S, Letellier G, Masson S, Zagamé Y, et al. Safety and adherence of pressure garment therapy in children with upper limb unilateral cerebral palsy. Results from a randomized clinical trial ancillary analysis. Frontiers in Pediatrics. 2023; 11:1043350. [DOI:10.3389/fped.2023.1043350] [PMID] [PMCID]
نوع مطالعه: پژوهشی |
موضوع مقاله:
اورتز و پروتز
ارسال پیام به نویسنده مسئول
| بازنشر اطلاعات | |
 |
این مقاله تحت شرایط Creative Commons Attribution-NonCommercial 4.0 International License قابل بازنشر است. |

تمامی آثار مجله آرشیو توانبخشی تحت مجوز Attribution-NonCommercial 4.0 هستند.
تماس با ما
فصلنامه آرشیو توانبخشی
تلفن دفتر فصلنامه: 02171732812
تلفن ناشر : 02145355555 - 02145355000
ایمیل: rehabilitationj@gmail.com
