

دوره 18، شماره 2 - ( تابستان 1396 )
دوره، شماره، فصل و سال، شماره مسلسل |
برگشت به فهرست نسخه ها


![]()
![]()
![]()
Download citation:
BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:



BibTeX | RIS | EndNote | Medlars | ProCite | Reference Manager | RefWorks
Send citation to:
Sharifmoradi K, Kamali M, Karimi M T. Effect of Hemipelvectomy Amputation on Kinematics and Muscle Force Generation of Lower Limb While Walking . Arch Rehabil 2017; 18 (2) :122-131
URL: http://rehabilitationj.uswr.ac.ir/article-1-1796-fa.html
URL: http://rehabilitationj.uswr.ac.ir/article-1-1796-fa.html
شریف مرادی کیوان، کمالی مصطفی، کریمی محمد تقی. اثر قطع عضو همیپلویکتومی بر کینماتیک و نیروی تولیدی عضلات اندام تحتانی حین راه رفتن با پروتز کانادین؛ گزارش موردی. مجله توانبخشی. 1396; 18 (2) :122-131
URL: http://rehabilitationj.uswr.ac.ir/article-1-1796-fa.html
1- گروه علوم ورزشی، دانشکده علوم انسانی، دانشگاه کاشان، کاشان، ایران.
2- گروه ارتوپدی فنی، دانشکده توانبخشی، دانشگاه علوم پزشکی اصفهان، اصفهان، ایران. ،mostafa_kamali@rehab.mui.ac.ir
3- گروه ارتوپدی فنی، دانشکده توانبخشی، دانشگاه علوم پزشکی اصفهان، اصفهان، ایران.
2- گروه ارتوپدی فنی، دانشکده توانبخشی، دانشگاه علوم پزشکی اصفهان، اصفهان، ایران. ،
3- گروه ارتوپدی فنی، دانشکده توانبخشی، دانشگاه علوم پزشکی اصفهان، اصفهان، ایران.
متن کامل [PDF 4809 kb]
(2907 دریافت)
| چکیده (HTML) (7686 مشاهده)

متن کامل: (6037 مشاهده)
مقدمه
قطع عضوهای اندام تحتانی در نتیجه تروما، بیماریهای عروقی، سرطان و غیره انجام میشود. شیوع قطع عضو بین 8/2 تا 9/43 درصد در هر صدهزار نفر متفاوت است که 5/0 درصد تا 3 درصد در سطح مفصل ران یا بالاتر انجام میشود [3-1]. میزان شیوع قطع عضو در ایران در سال 1381، 3/1 در هزار نفر تخمین زده شد. امروزه علت اصلی قطع عضو در ایران حوادث جادهای و تا حدودی حوادث در محیط کار است. بنابراین برنامهریزی در جهت پیشگیری، آموزش، فرهنگسازی و به ویژه درمان مصدومان باید در اولویت توجه مسئولان قرار گیرد [4]. دلیل اصلی قطع عضو مشکلات عروقی، بدخیمی، تروما و تومور است [5 ،1]. توانایی ایستادن و راهرفتن افراد با قطع عضو اندام تحتانی از دست میرود و استفاده از پروتز مخصوص برای بازگرداندن توانایی جابهجایی در این بیماران الزامی است [6 ،3].
قطع عضو همیپلویکتومی نوعی روش جراحی است که کل اندام تحتانی و بخشی از لگن برداشته میشود. بنابراین کارایی افراد با این قطع عضو با کارایی افراد با قطع عضو از سطح مفصل هیپ متفاوت است که این تفاوت ناشی از سطح بالاتر قطع عضو است. پروتزهای مختلفی برای ایجاد توانایی برای افراد دچار قطع عضو در سطح مفصل هیپ و قطع عضو همیپلویکتومی در ایستادن و راهرفتن طراحی شده است [7 ،6] که مصرف زیاد انرژی، کاهش سرعت راهرفتن، محدودیت دامنه حرکتی اندام تحتانی، تغییر کینماتیک و کینتیک راهرفتن و ظاهر نامناسب آن [12-8] از جمله مشکلات این پروتزهاست.
مطالعات درباره راهرفتن افراد دچار قطع عضو همیپلویک بسیار اندک و محدود به بررسی متغیرهای کینتیک و کینماتیک این گروه از بیماران است [11 ،9 ،8]. تنها در یک مطالعه نیروی اعمالی به پروتز فرد با قطع عضو هیپ حین راهرفتن بررسی شده است [10]. سرعت متوسط راهرفتن شخص با قطع عضو هیپ در حین راهرفتن با پروتز بین 83/0 و 31/1 میلیمتر بر ثانیه متفاوت بود [9]. به علاوه طول قدم این شخص بین 65/0 تا 96/0 متر متفاوت بود که با یک شخص عادی تفاوت عمدهای داشت [13 ،9]. مصرف انرژی افراد قطع عضو حین راهرفتن تقریباً دوبرابر افراد عادی بود [13].
پروتز کانادین، از انواع پروتزهایی است که بیمار با قطع همیپلویکتومی برای جابهجایی از آن استفاده میکند. راهرفتن بیمار با قطع عضو همیپلویک با راهرفتن دیگر بیماران با قطع عضو زیر زانو یا قطع عضو بالای زانو بسیار متفاوت است. فرد دچار قطع عضو بالای زانو که مفصل ران سالم دارد، میتواند پروتز را به صورت فعال و از طریق فعالیت عضلات اطراف مفصل ران حرکت دهد. در صورتی که بیمار با قطع عضو همیپلویک به دلیل ازدستدادن مفصل ران و قطع بخشی از پلویس، برای حرکت باید پروتز را به صورت غیرفعال و به صورت نوسانی حرکت دهد که مسئله با افزایش مدتزمان فاز نوسان پای پروتز و کاهش مدتزمان فاز استنس پای پروتز همراه است [14] و باعث افتادن وزن بیشتر بر پای سالم و وزن کمتر بر پای پروتز میشود. این موضوع ممکن است باعث افزایش درد و تخریب غضروف مفصل در بیماران دچار قطع عضو شود [17-15]. تمامی این عوامل به بیقرینگی در راهرفتن بیماران قطع عضو منجر میشود [19 ،18]. این تقارننداشتن باعث اعمال بار اضافی بر سیستم اسکلتیعضلانی میشود [20].
قطع عضوهای اندام تحتانی در نتیجه تروما، بیماریهای عروقی، سرطان و غیره انجام میشود. شیوع قطع عضو بین 8/2 تا 9/43 درصد در هر صدهزار نفر متفاوت است که 5/0 درصد تا 3 درصد در سطح مفصل ران یا بالاتر انجام میشود [3-1]. میزان شیوع قطع عضو در ایران در سال 1381، 3/1 در هزار نفر تخمین زده شد. امروزه علت اصلی قطع عضو در ایران حوادث جادهای و تا حدودی حوادث در محیط کار است. بنابراین برنامهریزی در جهت پیشگیری، آموزش، فرهنگسازی و به ویژه درمان مصدومان باید در اولویت توجه مسئولان قرار گیرد [4]. دلیل اصلی قطع عضو مشکلات عروقی، بدخیمی، تروما و تومور است [5 ،1]. توانایی ایستادن و راهرفتن افراد با قطع عضو اندام تحتانی از دست میرود و استفاده از پروتز مخصوص برای بازگرداندن توانایی جابهجایی در این بیماران الزامی است [6 ،3].
قطع عضو همیپلویکتومی نوعی روش جراحی است که کل اندام تحتانی و بخشی از لگن برداشته میشود. بنابراین کارایی افراد با این قطع عضو با کارایی افراد با قطع عضو از سطح مفصل هیپ متفاوت است که این تفاوت ناشی از سطح بالاتر قطع عضو است. پروتزهای مختلفی برای ایجاد توانایی برای افراد دچار قطع عضو در سطح مفصل هیپ و قطع عضو همیپلویکتومی در ایستادن و راهرفتن طراحی شده است [7 ،6] که مصرف زیاد انرژی، کاهش سرعت راهرفتن، محدودیت دامنه حرکتی اندام تحتانی، تغییر کینماتیک و کینتیک راهرفتن و ظاهر نامناسب آن [12-8] از جمله مشکلات این پروتزهاست.
مطالعات درباره راهرفتن افراد دچار قطع عضو همیپلویک بسیار اندک و محدود به بررسی متغیرهای کینتیک و کینماتیک این گروه از بیماران است [11 ،9 ،8]. تنها در یک مطالعه نیروی اعمالی به پروتز فرد با قطع عضو هیپ حین راهرفتن بررسی شده است [10]. سرعت متوسط راهرفتن شخص با قطع عضو هیپ در حین راهرفتن با پروتز بین 83/0 و 31/1 میلیمتر بر ثانیه متفاوت بود [9]. به علاوه طول قدم این شخص بین 65/0 تا 96/0 متر متفاوت بود که با یک شخص عادی تفاوت عمدهای داشت [13 ،9]. مصرف انرژی افراد قطع عضو حین راهرفتن تقریباً دوبرابر افراد عادی بود [13].
پروتز کانادین، از انواع پروتزهایی است که بیمار با قطع همیپلویکتومی برای جابهجایی از آن استفاده میکند. راهرفتن بیمار با قطع عضو همیپلویک با راهرفتن دیگر بیماران با قطع عضو زیر زانو یا قطع عضو بالای زانو بسیار متفاوت است. فرد دچار قطع عضو بالای زانو که مفصل ران سالم دارد، میتواند پروتز را به صورت فعال و از طریق فعالیت عضلات اطراف مفصل ران حرکت دهد. در صورتی که بیمار با قطع عضو همیپلویک به دلیل ازدستدادن مفصل ران و قطع بخشی از پلویس، برای حرکت باید پروتز را به صورت غیرفعال و به صورت نوسانی حرکت دهد که مسئله با افزایش مدتزمان فاز نوسان پای پروتز و کاهش مدتزمان فاز استنس پای پروتز همراه است [14] و باعث افتادن وزن بیشتر بر پای سالم و وزن کمتر بر پای پروتز میشود. این موضوع ممکن است باعث افزایش درد و تخریب غضروف مفصل در بیماران دچار قطع عضو شود [17-15]. تمامی این عوامل به بیقرینگی در راهرفتن بیماران قطع عضو منجر میشود [19 ،18]. این تقارننداشتن باعث اعمال بار اضافی بر سیستم اسکلتیعضلانی میشود [20].

بر طبق منابع در دسترس، تحقیقات انجامشده در زمینه راهرفتن بیماران همیپلویکتومی بسیار اندک است. با توجه به دانش نویسندگان مقاله حاضر، تحقیقی که همزمان کینماتیک و نیروی تولیدی عضلات اندام تحتانی حین راهرفتن را بررسی کرده باشد، وجود ندارد. شناسایی تغییرات صورتگرفته در کینماتیک و نیروهای تولیدی عضلات اندام تحتانی حین راهرفتن، نگرش جدیدی در اختیار متخصصان توانبخشی قرار میدهد تا با ارائه خدمات بهتر، کیفیت زندگی این بیماران را ارتقا بخشند. هدف از تحقیق حاضر بررسی اثر پروتز کانادین بر تغییرات کینماتیکی و نیروی تولیدی عضلات مختلف اندام تحتانی حین راهرفتن و به صورت مطالعه موردی بود.
روش بررسی
پژوهش حاضر از نوع نیمهتجربی بود. بیماری با قطع عضو همیپلویکتومی در سمت چپ با قد، وزن و سن به ترتیب 175سانتیمتر، 75 کیلوگرم، و 39 سال در مطالعه شرکت کرد (تصویر شماره 1). فرد سالمی نیز با قد، وزن و سن مشابه در این تحقیق شرکت کرد. شرایط پذیرش بیمار قطع عضو عبارت بود از: جنسیت مرد، قطع عضو همیپلویک، داشتن سیستم دهلیزی سالم، توانایی راهرفتن مستقل، استفاده از پروتز و وسیله کمکی. آزمودنی به مدت پنج سال از پروتز کانادین با مفصل چندمحوره مچ، مفصل زانوی 3R21 و مفصل هیپ 7E7 استفاده کرده است. پس از تشریح اهداف و روش تحقیق برای آزمودنیها، از آنها رضایتنامه کتبی برای شرکت در این پژوهش گرفته شد.
ابزار و روش
برای اندازهگیری متغیرهای کینماتیکی راهرفتن از سیستم تحلیل حرکتی کوالیسیس، ساخت شرکت کوالیسیس سوئیس شامل هفت دوربین استفاده شد. شرکت سازنده دقت صفحه نیروسنج را بسیار زیاد و میزان خطای این سیستم را کمتر از یک درصد اعلام کرده است [21].
دوربینها در دو سمت یک مسیر پیادهرو و به فاصله چهار متر از مرکز تخته نیرو قرار داده شدند. یک مسیر پیادهروی 10 متری در طول آزمایشگاه در نظر گرفته شد که یک صفحه نیروی کیستلر (600×500 میلیمتر، مدل AA 9260) ساخت کمپانی کیستلر سوئیس در میان مسیر قرار داشت. فضای کالیبراسیونی در نظر گرفته شد که تخته نیروها در مرکز قاعده این فضای مکعبی قرار داشتند. فاصله نقطه شروع راهرفتن آزمودنیها تا تخته نیرو پنج متر بود.
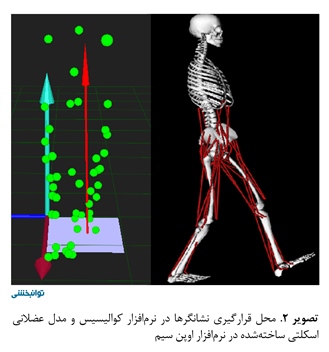
20 نشانگر منعکسکننده نور مادون قرمز با قطر 16 میلیمتر بر روی سطح قدامی فوقانی خار ایلیاک، سطح خلفی فوقانی خار ایلیاک، اپی کوندیلهای داخلی و خارجی در دو سمت راست و چپ، پاشنه، سر متاتارسهای اول و پنجم و مفصل اکرومیوکلاویکولار در دو سمت راست و چپ قرار داده شد (تصویر شماره 2). محل برنامه قرارگیری نشانگرهای روی بدن بر اساس برنامه مصوب دانشگاه استراتکلاید بود. فرکانس جمعآوری دادهها 120 هرتز بود. دادهها با فیلتر پایین گذر با فرکانس 10 هرتز فیلتر شدند [22]. ثبت دادههای کینماتیکی با استفاده از نرمافزار نسخه 7/2، ساخت شرکت کوالیسیس سوئیس ثبت شد. از نرمافزار ویژوال تریدی (نسخه 4، تولید شرکت سیموشن آمریکا) هم برای مدل کردن سیستم اسکلتیعضلانی بیمار و استخراج دادههای کینماتیک بیماران استفاده شد. خروجی نرمافزار ویژوال تریدی به نرمافزار اوپن سیم (نسخه 3، تولید دانشگاه استنفورد، امریکا) به منظور بررسی نیروی فعال عضلات اندام تحتانی انتقال داده شد. نرمافزار اوپن سیم نوعی نرمافزار شبیهساز و تجزیهوتحلیل سیستم اسکلتی عضلانی است که تحلیل حرکات و تخمین نیروهای سطح مفصلی و نیروی تولیدی عضلات با این نرمافزار امکانپذیر است. با شبیهسازی سیستم اسکلتی عضلانی امکان تشخیص و درمان حرکات پاتولوژیک و غیرطبیعی وجود دارد. همچنین با استفاده از این نرم افزار، بررسی اثرات بیومکانیکی درمان بر سیستم اسکلتی عضلانی امکان پذیر است [23].
پس از کالیبره کردن دوربینها و صفحه نیرو ابتدا دادههای آنتروپومتریکی آزمودنی شامل وزن، قد، طول پا، عرض زانو، فاصله بین خار خاصره فوقانی قدامی راست، عرض مچ پا همچنین با استفاده از این نرمافزار، بررسی آثار بیومکانیکی درمان بر سیستم اسکلتیعضلانی امکانپذیر است [23]. پس از تنظیمکردن دوربینها و صفحه نیرو ابتدا دادههای آنتروپومتریکی آزمودنی شامل وزن، قد، طول پا، عرض زانو، فاصله بین خار خاصره فوقانی قدامی راست، عرض مچ پا سمت راست بدن ثبت شد. سپس آزمودنی در مسیر تعیینشده راه میرفت و تصویر نشانگرها هنگام راهرفتن همراه با دادههای صفحه نیرو ثبت میشد. از نرمافزار کوالیسیس برای ثبت فازهای ایستادن و نوسان حین چرخه راهرفتن استفاده شد.
روش بررسی
پژوهش حاضر از نوع نیمهتجربی بود. بیماری با قطع عضو همیپلویکتومی در سمت چپ با قد، وزن و سن به ترتیب 175سانتیمتر، 75 کیلوگرم، و 39 سال در مطالعه شرکت کرد (تصویر شماره 1). فرد سالمی نیز با قد، وزن و سن مشابه در این تحقیق شرکت کرد. شرایط پذیرش بیمار قطع عضو عبارت بود از: جنسیت مرد، قطع عضو همیپلویک، داشتن سیستم دهلیزی سالم، توانایی راهرفتن مستقل، استفاده از پروتز و وسیله کمکی. آزمودنی به مدت پنج سال از پروتز کانادین با مفصل چندمحوره مچ، مفصل زانوی 3R21 و مفصل هیپ 7E7 استفاده کرده است. پس از تشریح اهداف و روش تحقیق برای آزمودنیها، از آنها رضایتنامه کتبی برای شرکت در این پژوهش گرفته شد.
ابزار و روش
برای اندازهگیری متغیرهای کینماتیکی راهرفتن از سیستم تحلیل حرکتی کوالیسیس، ساخت شرکت کوالیسیس سوئیس شامل هفت دوربین استفاده شد. شرکت سازنده دقت صفحه نیروسنج را بسیار زیاد و میزان خطای این سیستم را کمتر از یک درصد اعلام کرده است [21].
دوربینها در دو سمت یک مسیر پیادهرو و به فاصله چهار متر از مرکز تخته نیرو قرار داده شدند. یک مسیر پیادهروی 10 متری در طول آزمایشگاه در نظر گرفته شد که یک صفحه نیروی کیستلر (600×500 میلیمتر، مدل AA 9260) ساخت کمپانی کیستلر سوئیس در میان مسیر قرار داشت. فضای کالیبراسیونی در نظر گرفته شد که تخته نیروها در مرکز قاعده این فضای مکعبی قرار داشتند. فاصله نقطه شروع راهرفتن آزمودنیها تا تخته نیرو پنج متر بود.
20 نشانگر منعکسکننده نور مادون قرمز با قطر 16 میلیمتر بر روی سطح قدامی فوقانی خار ایلیاک، سطح خلفی فوقانی خار ایلیاک، اپی کوندیلهای داخلی و خارجی در دو سمت راست و چپ، پاشنه، سر متاتارسهای اول و پنجم و مفصل اکرومیوکلاویکولار در دو سمت راست و چپ قرار داده شد (تصویر شماره 2). محل برنامه قرارگیری نشانگرهای روی بدن بر اساس برنامه مصوب دانشگاه استراتکلاید بود. فرکانس جمعآوری دادهها 120 هرتز بود. دادهها با فیلتر پایین گذر با فرکانس 10 هرتز فیلتر شدند [22]. ثبت دادههای کینماتیکی با استفاده از نرمافزار نسخه 7/2، ساخت شرکت کوالیسیس سوئیس ثبت شد. از نرمافزار ویژوال تریدی (نسخه 4، تولید شرکت سیموشن آمریکا) هم برای مدل کردن سیستم اسکلتیعضلانی بیمار و استخراج دادههای کینماتیک بیماران استفاده شد. خروجی نرمافزار ویژوال تریدی به نرمافزار اوپن سیم (نسخه 3، تولید دانشگاه استنفورد، امریکا) به منظور بررسی نیروی فعال عضلات اندام تحتانی انتقال داده شد. نرمافزار اوپن سیم نوعی نرمافزار شبیهساز و تجزیهوتحلیل سیستم اسکلتی عضلانی است که تحلیل حرکات و تخمین نیروهای سطح مفصلی و نیروی تولیدی عضلات با این نرمافزار امکانپذیر است. با شبیهسازی سیستم اسکلتی عضلانی امکان تشخیص و درمان حرکات پاتولوژیک و غیرطبیعی وجود دارد. همچنین با استفاده از این نرم افزار، بررسی اثرات بیومکانیکی درمان بر سیستم اسکلتی عضلانی امکان پذیر است [23].
پس از کالیبره کردن دوربینها و صفحه نیرو ابتدا دادههای آنتروپومتریکی آزمودنی شامل وزن، قد، طول پا، عرض زانو، فاصله بین خار خاصره فوقانی قدامی راست، عرض مچ پا همچنین با استفاده از این نرمافزار، بررسی آثار بیومکانیکی درمان بر سیستم اسکلتیعضلانی امکانپذیر است [23]. پس از تنظیمکردن دوربینها و صفحه نیرو ابتدا دادههای آنتروپومتریکی آزمودنی شامل وزن، قد، طول پا، عرض زانو، فاصله بین خار خاصره فوقانی قدامی راست، عرض مچ پا سمت راست بدن ثبت شد. سپس آزمودنی در مسیر تعیینشده راه میرفت و تصویر نشانگرها هنگام راهرفتن همراه با دادههای صفحه نیرو ثبت میشد. از نرمافزار کوالیسیس برای ثبت فازهای ایستادن و نوسان حین چرخه راهرفتن استفاده شد.

مراحل اجرا
پس از تنظیم دوربینها و نصب نشانگرها، آزمودنی بدون کفش در مسیر تعیینشده راه میرفت. راهرفتن آزمودنیها پنجبار تکرار شد و در هریک از متغیرهای مدنظر میانگین پنجبار تکرار برای محاسبات آماری در نظر گرفته شد [22]. برای جلوگیری از خستگی، بین هر دو تکرار متوالی 30 ثانیه استراحت وجود داشت. تکرار آزمایش برای پنجبار معیار قابل قبولی برای ارزیابی متغیرهای کینماتیکی و کینتیکی است. در مطالعات موردی در صورتی که تعداد آزمونها از حد مشخصی بیشتر باشد، میتوان از این روش استفاده کرد [22]. متغیرهای تحقیق حاضر عبارتند از: متغیرهای کینماتیکی مفصل مچ پا، زانو و ران و نیروی فعال عضلات مختلف اندام تحتانی. محاسبه مقدار نیروی فعال عضله از طریق روابط تعریفشده برای نرمافزار اوپن سیم صورت گرفت. تجزیهوتحلیل دادهها با استفاده از روش آماری «تیتست مستقل» در محیط نرمافزار SPSS نسخه 19 و سطح معنیداری (5/0P<) صورت گرفت.
یافتهها
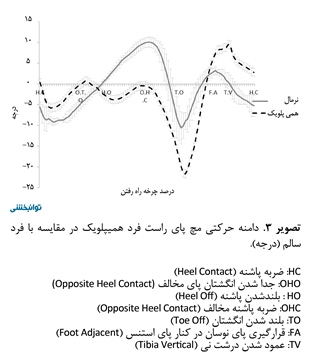
دامنه حرکتی مفصل مچ پا در یک چرخه کامل راهرفتن در تصویر شماره 3 آمده است. چنانکه مشاهده میشود دامنه حرکتی پلانتار فلکشن مچ پای بیمار همیپلویکتومی در فاز پذیرش وزن 4/8 درجه به دست آمد که 4/4 درجه از فرد سالم کمتر بود
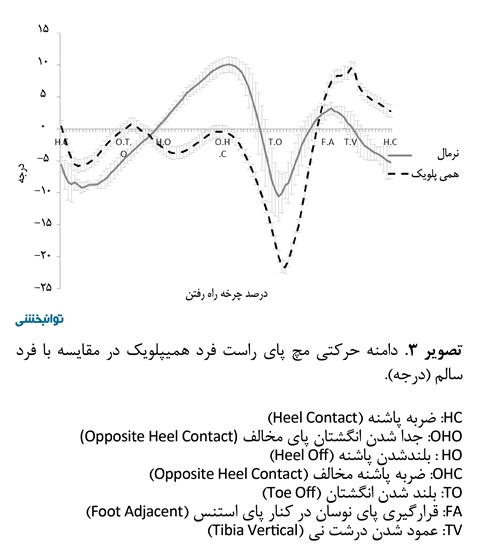
(00/0P=). در فاز میانه استنس دامنه حرکتی دورسی فلکشن مچ پا در بیمار همیپلویکتومی 6/4 درجه از فرد سالم کمتر بود (00/0P=). در فاز انتهای استنس پای بیمار همیپلویک 6/3 درجه پلانتار فلکشن بود، در حالی که پای فرد سالم در 5/4 درجه دورسی فلکشن قرار داشت که به طور معنیداری تفاوت نشان داد (00/0P=). در فاز پیشنوسان مچ پای بیمار همیپلویک در وضعیت پلانتار فلکشن 5/11 درجه از فرد سالم بیشتر بود. در فاز میانه نوسان دامنه حرکتی دورسی فلکشن بیمار همیپلویکتومی 6 درجه از فرد سالم بیشتر بود (00/0P=).
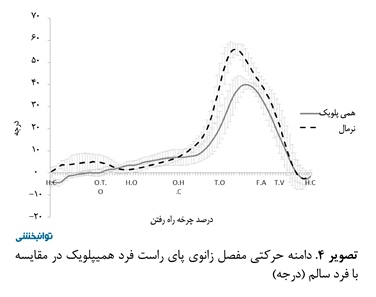
تصویر شماره 4 دامنه حرکتی مفصل زانو در چرخه کامل راهرفتن را نشان میدهد. چنانکه مشاهده میشود، در فاز پذیرش وزن دامنه حرکتی فلکشن زانوی پای بیمار همیپلویکتومی 6/14 درجه از فرد سالم بیشتر بود (00/0P=). دامنه حرکتی زانو در فاز میانه استنس در بیمار همیپلویکتومی در اکستنشن کامل بود، در حالی که دامنه حرکتی زانوی فرد سالم 5/4 درجه فلکشن داشت که حاکی از اختلاف معنیداری بود (04/0P=). در فاز انتهای استنس بین دامنه حرکتی فلکشن زانوی بیمار همیپلویکتومی و فرد سالم تفاوت معنیداری مشاهده نشد (16/0P=). در فاز پیشنوسان (00/0P=) و ابتدای نوسان (02/0P=) تفاوت معنیداری در دامنه حرکتی فلکشن مفصل زانوی بیمار همیپلویکتومی و فرد سالم مشاهده شد.
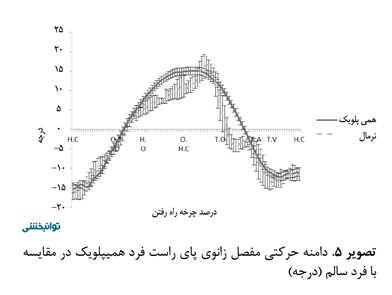
تصویر شماره 5 دامنه حرکتی مفصل ران در یک چرخه کامل راهرفتن را نشان میدهد. چنانکه مشاهده میشود، تفاوت معنیداری در فازهای مختلف راهرفتن بین بیمار همیپلویک و فرد سالم مشاهده نشد (05/0P>).
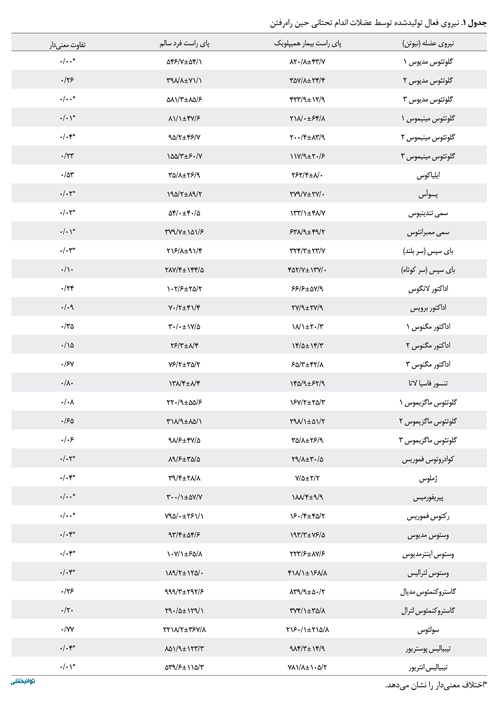
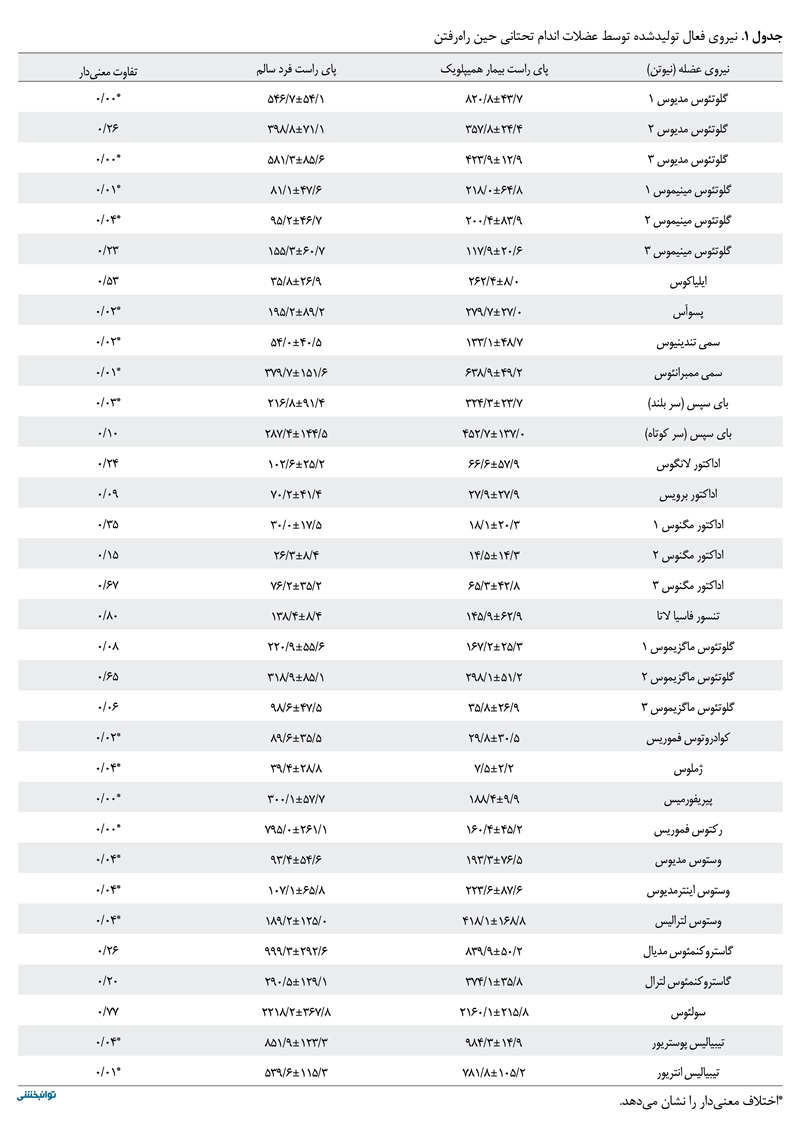
جدول شماره 1 نیروی فعال تولیدشده توسط عضلات اندام تحتانی حین راهرفتن را نشان میدهد. نیروی فعال عضلات گلوتئوس مدیوسبخش 1 و 3 (00/0P=)، گلوتئوس مینیموس بخش 1 (01/0P=) و بخش 2 (04/0P=)، پسوآس (02/0P=)، سمی ممبرنئوس (01/0P=)، سمی تندینیوس (02/0P=)، بای سپس فموریس سر دراز (03/0P=)، وستوس مدیالیس (04/0P=)، وستوس اینترمدیوس (04/0P=)، وستوس لترالیس (03/0P=)، تیبیالیس آنتریور (04/0P=) و تیبیالیس پوستریور (01/0P=) بیمار همیپلویکتومی به طور معنیداری از فرد سالم حین فاز استنس راهرفتن بیشتر بود. این در حالی است که فعالیت عضلات کوادری سپس (02/0P=)، ژملوس (04/0P=) و پیریفورمیس (00/0P=) فرد سالم به طور معنیداری از بیمار همیپلویک بیشتر بود.
بحث
هدف از تحقیق حاضر بررسی اثر قطع عضو همیپلویکتومی بر کینماتیک و نیروی تولیدی عضلات اندام تحتانی حین راهرفتن با پروتز کانادین- گزارش موردی بود. نتایج حاصل از تحقیق حاضر نشان داد قطع عضو همیپلویکتومی الگوی کینماتیک راهرفتن و نیروی تولیدی عضلات اندام تحتانی پای سالم را تغییر میدهد.
تصویر شماره 4 دامنه حرکتی مفصل زانو در چرخه کامل راهرفتن را نشان میدهد. چنانکه مشاهده میشود، در فاز پذیرش وزن دامنه حرکتی فلکشن زانوی پای بیمار همیپلویکتومی 6/14 درجه از فرد سالم بیشتر بود (00/0P=). دامنه حرکتی زانو در فاز میانه استنس در بیمار همیپلویکتومی در اکستنشن کامل بود، در حالی که دامنه حرکتی زانوی فرد سالم 5/4 درجه فلکشن داشت که حاکی از اختلاف معنیداری بود (04/0P=). در فاز انتهای استنس بین دامنه حرکتی فلکشن زانوی بیمار همیپلویکتومی و فرد سالم تفاوت معنیداری مشاهده نشد (16/0P=). در فاز پیشنوسان (00/0P=) و ابتدای نوسان (02/0P=) تفاوت معنیداری در دامنه حرکتی فلکشن مفصل زانوی بیمار همیپلویکتومی و فرد سالم مشاهده شد.
تصویر شماره 5 دامنه حرکتی مفصل ران در یک چرخه کامل راهرفتن را نشان میدهد. چنانکه مشاهده میشود، تفاوت معنیداری در فازهای مختلف راهرفتن بین بیمار همیپلویک و فرد سالم مشاهده نشد (05/0P>).
جدول شماره 1 نیروی فعال تولیدشده توسط عضلات اندام تحتانی حین راهرفتن را نشان میدهد. نیروی فعال عضلات گلوتئوس مدیوسبخش 1 و 3 (00/0P=)، گلوتئوس مینیموس بخش 1 (01/0P=) و بخش 2 (04/0P=)، پسوآس (02/0P=)، سمی ممبرنئوس (01/0P=)، سمی تندینیوس (02/0P=)، بای سپس فموریس سر دراز (03/0P=)، وستوس مدیالیس (04/0P=)، وستوس اینترمدیوس (04/0P=)، وستوس لترالیس (03/0P=)، تیبیالیس آنتریور (04/0P=) و تیبیالیس پوستریور (01/0P=) بیمار همیپلویکتومی به طور معنیداری از فرد سالم حین فاز استنس راهرفتن بیشتر بود. این در حالی است که فعالیت عضلات کوادری سپس (02/0P=)، ژملوس (04/0P=) و پیریفورمیس (00/0P=) فرد سالم به طور معنیداری از بیمار همیپلویک بیشتر بود.
بحث
هدف از تحقیق حاضر بررسی اثر قطع عضو همیپلویکتومی بر کینماتیک و نیروی تولیدی عضلات اندام تحتانی حین راهرفتن با پروتز کانادین- گزارش موردی بود. نتایج حاصل از تحقیق حاضر نشان داد قطع عضو همیپلویکتومی الگوی کینماتیک راهرفتن و نیروی تولیدی عضلات اندام تحتانی پای سالم را تغییر میدهد.


نتایج نشان داد الگوی حرکتی مفصل مچ پای بیمار همیپلویک کاملاً با فرد سالم متفاوت بود. در الگوی حرکتی مفصل مچ پای عادی در فاز لودینگ یک حرکت پلانتار فلکشن به طور غیرفعال در مچ پا صورت میگیرد، سپس مچ پا به دورسی فلکشن و در فاز پیشنوسان پا به پلانتار فلکشن میرود [23]. این در حالی است که پای بیمار همیپلویکتومی در فاز لودینگ و در فاز میانه استنس، حرکت پلانتار فلکشن را انجام داد. بنابراین الگوی حرکتی مفصل مچ پا در بیمار همیپلویکتومی به جای اینکه بعد از پلانتار فلکشن فاز لودینگ، به دورسی فلکشن در فاز ابتدای استنس و میانه استنس برود، مجدداً در فاز میانه استنس حرکت پلانتار فلکشن را انجام میدهد. بیمار همیپلویکتومی از پروتز کانادین در سمت دیگر اندام تحتانی استفاده میکند. از آنجایی که پروتز کانادین نمیتواند حرکت فعال در مفصل ران، زانو و مچ پا را انجام دهد، به صورت یک جسم سخت در زیر لگن طرف مقابل قرار میگیرد و حرکت این جسم سخت به صورت غیرفعال و با استفاده از گشتاور ایجادشده در تنه و لگن انجام میشود. بنابراین بیمار همیپلویکتومی با انجام حرکت پلانتار فلکشن مچ پای سالم در فاز میانه استنس سعی دارد مرکز جرم خود را بالا ببرد و بر ارتفاع اندام تحتانی سالم بیفزاید تا از این طریق بتواند از برخورد پروتز کانادین به زمین جلوگیری کند.
برخی محققان نشان دادند [24] که بیماران با قطع عضو اندام تحتانی حرکات جهشی را در اندام سالم حین فاز استنس انجام میدهند که این سازگاری احتمالاً برای جلوگیری از برخورد پای پروتزی با زمین حین فاز نوسان پای پروتزی است. کریمی و همکاران [14] هیچگونه اختلاف معنیداری در دامنه حرکتی مچ پای بیمار همی پلیویکتومی در سمت سالم و سمت قطع عضو مشاهده نکردند که با نتایج تحقیق حاضر مغایرت دارد. دلیل این تفاوت را میتوان اینگونه تشریح کرد که در تحقیق مذکور پای سالم و پای قطع عضو بیمار همیپلویک با هم مقایسه شده است، در حالی که در تحقیق حاضر پای قطع عضو بیمار همیپلویک با پای فرد سالم مقایسه شد. همچنین در تحقیق حاضر دامنه حرکتی مچ پا در طیف چرخه کامل راهرفتن مقایسه شد، در حالی که در تحقیق کریمی و همکاران [14] فقط دامنه حرکتی مچ پا گزارش و مقایسه شد.
نیروی تولیدی عضلات تیبالیس انتریور و تیبیالیس پوستریور فاز استنس راهرفتن در بیمار همیپلویکتومی به طور معنیداری از فرد سالم بیشتر بود. این اختلاف معنیدار در نیروی تولیدی عضلات مذکور با نتایج حاصل از کینماتیک مفصل مچ در فاز استنس مطابقت دارد و بر این مطلب دلالت دارد که قرارگرفتن بیمار همیپلویکتومی روی پنجه پا حین فاز میانه استنس به فعالیت بیشتر عضله تیبیالیس پوستریور نیاز دارد و افزایش بیشتر نیروی عضله تیبالیس انتریور هم در جهت کمک به تثبیت مفصل مچ پا حین حرکت پلانتار فلکشن است. تحقیقات انجامشده بر بیماران با قطع عضو اندام تحتانی نشان داد که گشتاور پلانتار فلکشن مچ پای سالم در این بیماران تا 20 درصد چرخه راهرفتن ادامه داشت، در صورتی که در افراد سالم گشتاور پلانتار فلکشن تا9 درصد چرخه راهرفتن ادامه داشت [25]. پلانتار فلکشن مچ پا در فاز جداشدن پاشنه از زمین منبع اصلی تولید انرژی است. کاهش در فاز جداشدن پاشنه از زمین مچ پا در پای پروتز که نوعی کار مکانیکی ذاتی مچ پاست، منجر به اتخاذ مکانیزمهای جبرانی در این بیماران میشود [27 ،26].
فلکشن زانو در فاز لودینگ و حرکت به سمت اکستنشن در فاز ابتدای استنس و میانه استنس و مجدداً ادامه حرکت به سمت فلکشن، در فاز پیشنوسان الگوی طبیعی کینماتیک مفصل زانو حین راهرفتن است [28 ،23]. اما بیمار همیپلویکتومی الگوی متفاوتی را در فاز استنس راهرفتن نشان داد. بیمار همیپلویکتومی با اکستنشن کامل مفصل زانو در فازهای لودینگ، ابتدای استنس و میانه استنس راه میرفت. محققان نیز نشان دادند که دامنه حرکتی فلکشن زانو در پای سالم و پای قطع عضو بیمار همیپلویک تفاوت معنیداری دارد [14]. همچنین نتایج نشان داد که نیروی تولیدی عضلات وستوس اینترمدیوس، وستوس لترالیس و وستوس مدیالیس بیمار همیپلویکتومی حین فاز استنس راهرفتن به طور معنیداری از نیروی تولیدی این عضلات در پای همسان فرد سالم بیشتر است.
در راهرفتن عادی مقداری فلکشن در فاز لودینگ مفصل زانو وجود دارد که این میزان خمیدگی با انقباض اکستنریک عضلات چهار سر رانی کنترل میشود و به نیروی کمتری نیاز است، اما راهرفتن با زانوی کاملاً باز نیاز به انقباض شدید عضلات چهار سر رانی دارد که دلیل تفاوت نیروی تولیدی در این عضلات را توجیه میکند. تحقیقات گذشته نشان دادند فلکشن زانو حین فاز لودینگ اثر جذبکننده شوک را دارد که به کمک انقباض اکسنتریک عضلات چهار سر رانی کنترل میشود و عامل مؤثر در جلوگیری از تخریب مفصل و ترس از تحمل وزن است [29]. نتایج تحقیق حاضر نشان داد حین مرحله لودینگ فاز استنس، زانو در وضعیت اکستنشن باقی میماند و عمل فلکشن زانو به عنوان جذبکننده شوک حذف میشود. بنابراین در این مرحله عضلات نیرویی جذب نمیکنند و ممکن است ساختارهای مفصل نیروی جذبنشده را مستقیم جذب کنند که میتواند به ساختارهای مفصل زانو آسیب وارد کند.
نیروی تولیدی عضلات گلوتئوس مدیوس و مینموس پای سالم بیمار همیپلویکتومی به طور معنیداری از فرد سالم بیشتر بود. شاید علت افزایش فعالیت این عضلات به دلیل این باشد که وزن پروتز کانادین سمت دیگر لگن را به پایین میکشد، از طرف دیگر حین فاز استنس، بیمار تلاش میکند که از برخورد پروتز با زمین جلوگیری کند و همچنین بیمار مدتزمان بیشتری را برای چرخاندن پروتز به سمت جلو صرف میکند [25]. بنابراین با افزایش نیروی تولیدی عضلات گلوتئوس مدیوس و مینموس این عمل را انجام میدهد.
نتایج حاصل از تحقیق حاضر نشان داد نیروی عضلات سمی تندینیوس، سمی ممبرنئوس و بای سپس فموریس پای سالم بیمار همیپلویکتومی به طور معنیداری از پای همتای فرد سالم بیشتر بود. مکنیلی و همکاران دریافتند که میانگین گشتاور اکستنشن ران افراد با قطع عضو اندام تحتانی در صفحه ساجیتال در ابتدای فاز ضربه پاشنه N.m/kg 8 است که دور برابر افراد عادی N.m/kg 3 است [25]. از آنجایی که این بیماران هیچگونه کنترل فعالی بر مفصل مچ پا و زانو ندارند، گشتاور تولیدشده در ران در جهت کمک به پیشروی است [25]. محققان دیگر نشان دادند توان مفصل ران بیماران با قطع عضو اندام تحتانی تا نیمه اول چرخه راهرفتن (55 تا60 درصد چرخه راهرفتن از افراد عادی (تا20 درصدچرخه راهرفتن) بیشتر بود و نتایج تحقیقات الکترومیوگرافی نشان داد که این توان اکستنسورهای مفصل ران به دلیل افزایش فعالیت عضلات سرینی بزرگ و همسترینگ است [26] که با نتایج حاصل از تحقیق حاضر مطابقت دارد. افزایش فعالیت اکستنسورهای ران در ابتدای فاز استنس به دلیل کنترل فلکشن زانو در فاز لودینگ و کنترل حرکت روبهجلوی تنه بعد از فاز ضربه پاشنه است.
نتیجهگیری
کینماتیک راهرفتن افراد قطع عضو همیپلویکتومی با استفاده از پروتز کانادین به طور بارزی تغییر میکند. این تغییرات با افزایش نیروی تولیدی عضلات مختلف اندام تحتانی همراه است. تغییرات کینماتیکی همراه با افزایش معنیدار نیروی تولیدی عضلات مختلف، میتواند اثر مخربی بر مفاصل اندام تحتانی به خصوص مفصل زانو داشته باشد که اهمیت این موضوع باید مدنظر توانبخشان و متخصصان توانبخشی قرار گیرد. عملکرد طبیعی نداشتن در مچ پا، زانو و ران پروتز کانادین منجر به اتخاذ مکانیزم جبرانی عضلات اندام سالم برای راهرفتن شد.
استفاده بیمار همیپلویکتومی از عصا حین راهرفتن محدودیت تحقیق حاضر بود. دیگر محدودیت تحقیق حاضر نبودن پیشنه تحقیق درباره راهرفتن بیمار همیپلویکتومی است. از آنجا که هیچگونه تحقیق مشابه در ادبیات بر کینماتیک و نیروی تولیدی عضلات اندام تحتانی بیمار همیپلویک وجود نداشت، محققان مقاله حاضر بر آن شدند تا نتایج حاصل از کینماتیک و نیروی تولیدی عضلات اندام تحتانی را با نتایج دیگر تحقیقات انجامشده بر قطع عضو اندام تحتانی مقایسه و تفسیر کنند.
پیشنهاد برای تحقیقات آینده: راهرفتن با زانوی صاف و نداشتن عملکرد عضلات چهار سر رانی به صورت غیرفعال باعث میشود این عضلات نیرو را در مفصل زانو جذب نکنند و همین موضوع سبب میشود جذب نیرو در مفصل زانو افزایش یابد که میتواند اثر تخریبی بر غضروف مفصل زانو بگذارد. تحقیقات آینده باید میزان فشار وارد بر مفصل زانو حین فاز استنس راهرفتن بیمار همیپلویکتومی را بررسی کند.
تشکر و قدردانی
در پایان از آزمودنی قطع عضو همیپلویکتومی به دلیل شرکت در این تحقیق و همچنین از مرکز تحقیقات عضلانیاسکلتی دانشکده توانبخشی دانشگاه اصفهان به خاطر در اختیار قراردادن آزمایشگاه تشکر و قدردانی میشود. این پژوهش حامی مالی نداشته است.
برخی محققان نشان دادند [24] که بیماران با قطع عضو اندام تحتانی حرکات جهشی را در اندام سالم حین فاز استنس انجام میدهند که این سازگاری احتمالاً برای جلوگیری از برخورد پای پروتزی با زمین حین فاز نوسان پای پروتزی است. کریمی و همکاران [14] هیچگونه اختلاف معنیداری در دامنه حرکتی مچ پای بیمار همی پلیویکتومی در سمت سالم و سمت قطع عضو مشاهده نکردند که با نتایج تحقیق حاضر مغایرت دارد. دلیل این تفاوت را میتوان اینگونه تشریح کرد که در تحقیق مذکور پای سالم و پای قطع عضو بیمار همیپلویک با هم مقایسه شده است، در حالی که در تحقیق حاضر پای قطع عضو بیمار همیپلویک با پای فرد سالم مقایسه شد. همچنین در تحقیق حاضر دامنه حرکتی مچ پا در طیف چرخه کامل راهرفتن مقایسه شد، در حالی که در تحقیق کریمی و همکاران [14] فقط دامنه حرکتی مچ پا گزارش و مقایسه شد.
نیروی تولیدی عضلات تیبالیس انتریور و تیبیالیس پوستریور فاز استنس راهرفتن در بیمار همیپلویکتومی به طور معنیداری از فرد سالم بیشتر بود. این اختلاف معنیدار در نیروی تولیدی عضلات مذکور با نتایج حاصل از کینماتیک مفصل مچ در فاز استنس مطابقت دارد و بر این مطلب دلالت دارد که قرارگرفتن بیمار همیپلویکتومی روی پنجه پا حین فاز میانه استنس به فعالیت بیشتر عضله تیبیالیس پوستریور نیاز دارد و افزایش بیشتر نیروی عضله تیبالیس انتریور هم در جهت کمک به تثبیت مفصل مچ پا حین حرکت پلانتار فلکشن است. تحقیقات انجامشده بر بیماران با قطع عضو اندام تحتانی نشان داد که گشتاور پلانتار فلکشن مچ پای سالم در این بیماران تا 20 درصد چرخه راهرفتن ادامه داشت، در صورتی که در افراد سالم گشتاور پلانتار فلکشن تا9 درصد چرخه راهرفتن ادامه داشت [25]. پلانتار فلکشن مچ پا در فاز جداشدن پاشنه از زمین منبع اصلی تولید انرژی است. کاهش در فاز جداشدن پاشنه از زمین مچ پا در پای پروتز که نوعی کار مکانیکی ذاتی مچ پاست، منجر به اتخاذ مکانیزمهای جبرانی در این بیماران میشود [27 ،26].
فلکشن زانو در فاز لودینگ و حرکت به سمت اکستنشن در فاز ابتدای استنس و میانه استنس و مجدداً ادامه حرکت به سمت فلکشن، در فاز پیشنوسان الگوی طبیعی کینماتیک مفصل زانو حین راهرفتن است [28 ،23]. اما بیمار همیپلویکتومی الگوی متفاوتی را در فاز استنس راهرفتن نشان داد. بیمار همیپلویکتومی با اکستنشن کامل مفصل زانو در فازهای لودینگ، ابتدای استنس و میانه استنس راه میرفت. محققان نیز نشان دادند که دامنه حرکتی فلکشن زانو در پای سالم و پای قطع عضو بیمار همیپلویک تفاوت معنیداری دارد [14]. همچنین نتایج نشان داد که نیروی تولیدی عضلات وستوس اینترمدیوس، وستوس لترالیس و وستوس مدیالیس بیمار همیپلویکتومی حین فاز استنس راهرفتن به طور معنیداری از نیروی تولیدی این عضلات در پای همسان فرد سالم بیشتر است.
در راهرفتن عادی مقداری فلکشن در فاز لودینگ مفصل زانو وجود دارد که این میزان خمیدگی با انقباض اکستنریک عضلات چهار سر رانی کنترل میشود و به نیروی کمتری نیاز است، اما راهرفتن با زانوی کاملاً باز نیاز به انقباض شدید عضلات چهار سر رانی دارد که دلیل تفاوت نیروی تولیدی در این عضلات را توجیه میکند. تحقیقات گذشته نشان دادند فلکشن زانو حین فاز لودینگ اثر جذبکننده شوک را دارد که به کمک انقباض اکسنتریک عضلات چهار سر رانی کنترل میشود و عامل مؤثر در جلوگیری از تخریب مفصل و ترس از تحمل وزن است [29]. نتایج تحقیق حاضر نشان داد حین مرحله لودینگ فاز استنس، زانو در وضعیت اکستنشن باقی میماند و عمل فلکشن زانو به عنوان جذبکننده شوک حذف میشود. بنابراین در این مرحله عضلات نیرویی جذب نمیکنند و ممکن است ساختارهای مفصل نیروی جذبنشده را مستقیم جذب کنند که میتواند به ساختارهای مفصل زانو آسیب وارد کند.
نیروی تولیدی عضلات گلوتئوس مدیوس و مینموس پای سالم بیمار همیپلویکتومی به طور معنیداری از فرد سالم بیشتر بود. شاید علت افزایش فعالیت این عضلات به دلیل این باشد که وزن پروتز کانادین سمت دیگر لگن را به پایین میکشد، از طرف دیگر حین فاز استنس، بیمار تلاش میکند که از برخورد پروتز با زمین جلوگیری کند و همچنین بیمار مدتزمان بیشتری را برای چرخاندن پروتز به سمت جلو صرف میکند [25]. بنابراین با افزایش نیروی تولیدی عضلات گلوتئوس مدیوس و مینموس این عمل را انجام میدهد.
نتایج حاصل از تحقیق حاضر نشان داد نیروی عضلات سمی تندینیوس، سمی ممبرنئوس و بای سپس فموریس پای سالم بیمار همیپلویکتومی به طور معنیداری از پای همتای فرد سالم بیشتر بود. مکنیلی و همکاران دریافتند که میانگین گشتاور اکستنشن ران افراد با قطع عضو اندام تحتانی در صفحه ساجیتال در ابتدای فاز ضربه پاشنه N.m/kg 8 است که دور برابر افراد عادی N.m/kg 3 است [25]. از آنجایی که این بیماران هیچگونه کنترل فعالی بر مفصل مچ پا و زانو ندارند، گشتاور تولیدشده در ران در جهت کمک به پیشروی است [25]. محققان دیگر نشان دادند توان مفصل ران بیماران با قطع عضو اندام تحتانی تا نیمه اول چرخه راهرفتن (55 تا60 درصد چرخه راهرفتن از افراد عادی (تا20 درصدچرخه راهرفتن) بیشتر بود و نتایج تحقیقات الکترومیوگرافی نشان داد که این توان اکستنسورهای مفصل ران به دلیل افزایش فعالیت عضلات سرینی بزرگ و همسترینگ است [26] که با نتایج حاصل از تحقیق حاضر مطابقت دارد. افزایش فعالیت اکستنسورهای ران در ابتدای فاز استنس به دلیل کنترل فلکشن زانو در فاز لودینگ و کنترل حرکت روبهجلوی تنه بعد از فاز ضربه پاشنه است.
نتیجهگیری
کینماتیک راهرفتن افراد قطع عضو همیپلویکتومی با استفاده از پروتز کانادین به طور بارزی تغییر میکند. این تغییرات با افزایش نیروی تولیدی عضلات مختلف اندام تحتانی همراه است. تغییرات کینماتیکی همراه با افزایش معنیدار نیروی تولیدی عضلات مختلف، میتواند اثر مخربی بر مفاصل اندام تحتانی به خصوص مفصل زانو داشته باشد که اهمیت این موضوع باید مدنظر توانبخشان و متخصصان توانبخشی قرار گیرد. عملکرد طبیعی نداشتن در مچ پا، زانو و ران پروتز کانادین منجر به اتخاذ مکانیزم جبرانی عضلات اندام سالم برای راهرفتن شد.
استفاده بیمار همیپلویکتومی از عصا حین راهرفتن محدودیت تحقیق حاضر بود. دیگر محدودیت تحقیق حاضر نبودن پیشنه تحقیق درباره راهرفتن بیمار همیپلویکتومی است. از آنجا که هیچگونه تحقیق مشابه در ادبیات بر کینماتیک و نیروی تولیدی عضلات اندام تحتانی بیمار همیپلویک وجود نداشت، محققان مقاله حاضر بر آن شدند تا نتایج حاصل از کینماتیک و نیروی تولیدی عضلات اندام تحتانی را با نتایج دیگر تحقیقات انجامشده بر قطع عضو اندام تحتانی مقایسه و تفسیر کنند.
پیشنهاد برای تحقیقات آینده: راهرفتن با زانوی صاف و نداشتن عملکرد عضلات چهار سر رانی به صورت غیرفعال باعث میشود این عضلات نیرو را در مفصل زانو جذب نکنند و همین موضوع سبب میشود جذب نیرو در مفصل زانو افزایش یابد که میتواند اثر تخریبی بر غضروف مفصل زانو بگذارد. تحقیقات آینده باید میزان فشار وارد بر مفصل زانو حین فاز استنس راهرفتن بیمار همیپلویکتومی را بررسی کند.
تشکر و قدردانی
در پایان از آزمودنی قطع عضو همیپلویکتومی به دلیل شرکت در این تحقیق و همچنین از مرکز تحقیقات عضلانیاسکلتی دانشکده توانبخشی دانشگاه اصفهان به خاطر در اختیار قراردادن آزمایشگاه تشکر و قدردانی میشود. این پژوهش حامی مالی نداشته است.
References
[1]Dillingham TR, Pezzin LE, MacKenzie EJ. Limb amputation and limb deficiency. Southern Medical Journal. 2002; 95(8):875-83. doi: 10.1097/00007611-200295080-00019
[2]Bowker JH, John MW. Atlas of limb prosthetics: Surgical, prosthetic and rehabilitation principles. Missouri: Mosby; 1992.
[3]Smith DG, Michael JW, Bowker JH. Atlas of amputations and limb deficiencies: Surgical, prosthetic, and rehabilitation principles. Rosemont: American Academy of Orthopaedic Surgeons; 2004.
[4]Masoudi-Asl I, Nasiri-Pour AA, Faraj-Zadeh F, E'badi M. [Management of work–related injuries leading to amputation and its relation with treatment outcome (Persian)]. Archives of Rehabilitation. 2011; 12(1):34-38.
[5]Unwin N. Epidemiology of lower extremity amputation in centres in Europe, North America and East Asia. British Journal of Surgery. 2000; 87(3):328-37. doi: 10.1046/j.1365-2168.2000.01344.x
[6]Denes Z, Till A .Rehabilitation of patients after hip disarticulation. Archives of Orthopaedic and Trauma Surgery. 1997; 116(8):498–9. doi: 10.1007/s004020050171
[7]Zaffer SM, Braddom RL, Conti A, Goff J, Bokma D. Total hip disarticulation prosthesis with suction socket. American Journal of Physical Medicine & Rehabilitation. 1999; 78(2):160-2. doi: 10.1097/00002060-199903000-00017
[8]Chin T, Kuroda R, Akisue T, Iguchi T, Kurosaka M. Energy consumption during prosthetic walking and physical fitness in older hip disarticulation amputees. Journal of Rehabilitation Research & Development; 2012; 49(8):1255-60. doi: 10.1682/jrrd.2011.04.0067
[9]Ludwigs E, Bellmann M, Schmalz T, Blumentritt S. Biomechanical differences between two exoprosthetic hip joint systems during level walking. Prosthetics and Orthotics International. 2010; 34(4):449-60. doi: 10.3109/03093646.2010.499551
[10]Nietert M, Englisch N, Kreil P, Alba-Lopez G. Loads in hip disarticulation prostheses during normal daily use. Prosthetics and Orthotics International. 1998; 22(3):199-215. doi: 10.3109/03093649809164485
[11]Schnall BL, Baum BS, Andrews AM. Gait characteristics of a soldier with a traumatic hip disarticulation. Physical Therapy. 2008; 88(12):1568-77. doi: 10.2522/ptj.20070337
[12]Yari P, Dijkstra PU, Geertzen JH. Functional outcome of hip disarticulation and hemipelvectomy: A cross-sectional national descriptive study in the Netherlands. Clinical Rehabilitation. 2008; 22(12):1127-33. doi: 10.1177/0269215508095088
[13]Kadaba MP, Ramakrishnan HK, Wootten ME, Gainey J, Gorton G, Cochran GVB. Repeatability of kinematic, kinetic, and electromyographic data in normal adult gait. Journal of Orthopaedic Research. 1989; 7(6):849-60. doi: 10.1002/jor.1100070611
[14]Karimi M, Kamali M, Omar H, Mostmand J. Evaluation of gait performance of a hemipelvectomy amputation walking with a canadian prosthesis. Case Reports in Orthopedics. 2014; 2014. doi: 10.1155/2014/962980
[15]Czerniecki JM. Rehabilitation in limb deficiency. Gait and motion analysis. Archives of Physical Medicine and Rehabilitation. 1996; 77(3):3–8. doi: 10.1016/s0003-9993(96)90236-1
[16]Radin EL, Parker HG, Pugh JW, Steinberg RS, Paul IL, Rose RM. Response of joints to impact loading-III. Journal of Biomechanics. 1973; 6(1):51-7. doi: 10.1016/0021-9290(73)90037-7
[17]Hurwitz DE, Sumner DR, Block JA. Bone density, dynamic joint loading and joint degeneration. Cells Tissues Organs. 2001; 169(3):201-9. doi: 10.1159/000047883
[18]Jaegers SMHJ, Arendzen JH, de Jongh HJ. Prosthetic gait of unilateral transfemoral amputees: A kinematic study. Archives of Physical Medicine and Rehabilitation. 1995; 76(8):736-43. doi: 10.1016/s0003-9993(95)80528-1
[19]Gitter A, Czerniecki J, Weaver K. A reassessment of center-of-mass dynamics as a determinate of the metabolic inefficiency of above-knee amputee ambulation. American Journal of Physical Medicine & Rehabilitation. 1995; 74(5):332-8. PMID: 7576408
[20]Haberman A. Mechanical properties of dynamic energy return prosthetic feet. Ontario: Queen’s University; 2008.
[21]Hall MG, Fleming HE, Dolan MJ, Millbank SFD, Paul JP. Static in situ calibration of force plates. Journal of Biomechanics. 1996; 29(5):659-65. doi: 10.1016/0021-9290(95)00109-3
[22]Keselman HJ, Othman AR, Wilcox RR, Fradette K. The new and improved two-sample t-test. Psychological Science. 2004; 15(1):47-51. doi: 10.1111/j.0963-7214.2004.01501008.x
[23]Whittle MW. Gait analysis: An introduction. London: Butterworth-Heinemann; 2014.
[24]Sjödahl C, Jarnlo GB, Söderberg B, Persson BM. Kinematic and kinetic gait analysis in the sagittal plane of trans-femoral amputees before and after special gait re-education. Prosthetics and Orthotics International. 2002; 26(2):101-12. doi: 10.1080/03093640208726632
[25]McNealy LL, Gard S. Effect of prosthetic ankle units on the gait of persons with bilateral trans-femoral amputations. Prosthetics and Orthotics International. 2008; 32(1):111-26. doi: 10.1080/02699200701847244
[26]Sadeghi H, Allard P, Duhaime M. Muscle power compensatory physical medicine and rehabilitation. Ovid Technologies. 2001; 80(1):25-32. doi: 10.1097/00002060-200101000-00007
[27]Seroussi RE, Gitter A, Czerniecki JM, Weaver K. Mechanical work adaptations of above-knee amputee ambulation. Archives of Physical Medicine and Rehabilitation. 1996; 77(11):1209-14. doi: 10.1016/s0003-9993(96)90151-3
[28]Oatis C. Kynesiology: The mechanics and pathomechanics of human movement. Philadelphia: Lippincott Williams & Wilkins; 2004.
[29]Isakov E, Burger H, Krajnik J, Gregoric M, Marincek C. Influence of speed on gait parameters and on symmetry in transtibial amputees. Prosthetics and Orthotics International. 1996; 20(3):153-8. PMID: 8985994
[1]Dillingham TR, Pezzin LE, MacKenzie EJ. Limb amputation and limb deficiency. Southern Medical Journal. 2002; 95(8):875-83. doi: 10.1097/00007611-200295080-00019
[2]Bowker JH, John MW. Atlas of limb prosthetics: Surgical, prosthetic and rehabilitation principles. Missouri: Mosby; 1992.
[3]Smith DG, Michael JW, Bowker JH. Atlas of amputations and limb deficiencies: Surgical, prosthetic, and rehabilitation principles. Rosemont: American Academy of Orthopaedic Surgeons; 2004.
[4]Masoudi-Asl I, Nasiri-Pour AA, Faraj-Zadeh F, E'badi M. [Management of work–related injuries leading to amputation and its relation with treatment outcome (Persian)]. Archives of Rehabilitation. 2011; 12(1):34-38.
[5]Unwin N. Epidemiology of lower extremity amputation in centres in Europe, North America and East Asia. British Journal of Surgery. 2000; 87(3):328-37. doi: 10.1046/j.1365-2168.2000.01344.x
[6]Denes Z, Till A .Rehabilitation of patients after hip disarticulation. Archives of Orthopaedic and Trauma Surgery. 1997; 116(8):498–9. doi: 10.1007/s004020050171
[7]Zaffer SM, Braddom RL, Conti A, Goff J, Bokma D. Total hip disarticulation prosthesis with suction socket. American Journal of Physical Medicine & Rehabilitation. 1999; 78(2):160-2. doi: 10.1097/00002060-199903000-00017
[8]Chin T, Kuroda R, Akisue T, Iguchi T, Kurosaka M. Energy consumption during prosthetic walking and physical fitness in older hip disarticulation amputees. Journal of Rehabilitation Research & Development; 2012; 49(8):1255-60. doi: 10.1682/jrrd.2011.04.0067
[9]Ludwigs E, Bellmann M, Schmalz T, Blumentritt S. Biomechanical differences between two exoprosthetic hip joint systems during level walking. Prosthetics and Orthotics International. 2010; 34(4):449-60. doi: 10.3109/03093646.2010.499551
[10]Nietert M, Englisch N, Kreil P, Alba-Lopez G. Loads in hip disarticulation prostheses during normal daily use. Prosthetics and Orthotics International. 1998; 22(3):199-215. doi: 10.3109/03093649809164485
[11]Schnall BL, Baum BS, Andrews AM. Gait characteristics of a soldier with a traumatic hip disarticulation. Physical Therapy. 2008; 88(12):1568-77. doi: 10.2522/ptj.20070337
[12]Yari P, Dijkstra PU, Geertzen JH. Functional outcome of hip disarticulation and hemipelvectomy: A cross-sectional national descriptive study in the Netherlands. Clinical Rehabilitation. 2008; 22(12):1127-33. doi: 10.1177/0269215508095088
[13]Kadaba MP, Ramakrishnan HK, Wootten ME, Gainey J, Gorton G, Cochran GVB. Repeatability of kinematic, kinetic, and electromyographic data in normal adult gait. Journal of Orthopaedic Research. 1989; 7(6):849-60. doi: 10.1002/jor.1100070611
[14]Karimi M, Kamali M, Omar H, Mostmand J. Evaluation of gait performance of a hemipelvectomy amputation walking with a canadian prosthesis. Case Reports in Orthopedics. 2014; 2014. doi: 10.1155/2014/962980
[15]Czerniecki JM. Rehabilitation in limb deficiency. Gait and motion analysis. Archives of Physical Medicine and Rehabilitation. 1996; 77(3):3–8. doi: 10.1016/s0003-9993(96)90236-1
[16]Radin EL, Parker HG, Pugh JW, Steinberg RS, Paul IL, Rose RM. Response of joints to impact loading-III. Journal of Biomechanics. 1973; 6(1):51-7. doi: 10.1016/0021-9290(73)90037-7
[17]Hurwitz DE, Sumner DR, Block JA. Bone density, dynamic joint loading and joint degeneration. Cells Tissues Organs. 2001; 169(3):201-9. doi: 10.1159/000047883
[18]Jaegers SMHJ, Arendzen JH, de Jongh HJ. Prosthetic gait of unilateral transfemoral amputees: A kinematic study. Archives of Physical Medicine and Rehabilitation. 1995; 76(8):736-43. doi: 10.1016/s0003-9993(95)80528-1
[19]Gitter A, Czerniecki J, Weaver K. A reassessment of center-of-mass dynamics as a determinate of the metabolic inefficiency of above-knee amputee ambulation. American Journal of Physical Medicine & Rehabilitation. 1995; 74(5):332-8. PMID: 7576408
[20]Haberman A. Mechanical properties of dynamic energy return prosthetic feet. Ontario: Queen’s University; 2008.
[21]Hall MG, Fleming HE, Dolan MJ, Millbank SFD, Paul JP. Static in situ calibration of force plates. Journal of Biomechanics. 1996; 29(5):659-65. doi: 10.1016/0021-9290(95)00109-3
[22]Keselman HJ, Othman AR, Wilcox RR, Fradette K. The new and improved two-sample t-test. Psychological Science. 2004; 15(1):47-51. doi: 10.1111/j.0963-7214.2004.01501008.x
[23]Whittle MW. Gait analysis: An introduction. London: Butterworth-Heinemann; 2014.
[24]Sjödahl C, Jarnlo GB, Söderberg B, Persson BM. Kinematic and kinetic gait analysis in the sagittal plane of trans-femoral amputees before and after special gait re-education. Prosthetics and Orthotics International. 2002; 26(2):101-12. doi: 10.1080/03093640208726632
[25]McNealy LL, Gard S. Effect of prosthetic ankle units on the gait of persons with bilateral trans-femoral amputations. Prosthetics and Orthotics International. 2008; 32(1):111-26. doi: 10.1080/02699200701847244
[26]Sadeghi H, Allard P, Duhaime M. Muscle power compensatory physical medicine and rehabilitation. Ovid Technologies. 2001; 80(1):25-32. doi: 10.1097/00002060-200101000-00007
[27]Seroussi RE, Gitter A, Czerniecki JM, Weaver K. Mechanical work adaptations of above-knee amputee ambulation. Archives of Physical Medicine and Rehabilitation. 1996; 77(11):1209-14. doi: 10.1016/s0003-9993(96)90151-3
[28]Oatis C. Kynesiology: The mechanics and pathomechanics of human movement. Philadelphia: Lippincott Williams & Wilkins; 2004.
[29]Isakov E, Burger H, Krajnik J, Gregoric M, Marincek C. Influence of speed on gait parameters and on symmetry in transtibial amputees. Prosthetics and Orthotics International. 1996; 20(3):153-8. PMID: 8985994
نوع مطالعه: گزارش موردی |
موضوع مقاله:
مدیریت توانبخشی
ارسال پیام به نویسنده مسئول
| بازنشر اطلاعات | |
 |
این مقاله تحت شرایط Creative Commons Attribution-NonCommercial 4.0 International License قابل بازنشر است. |

تمامی آثار مجله آرشیو توانبخشی تحت مجوز Attribution-NonCommercial 4.0 هستند.
تماس با ما
فصلنامه آرشیو توانبخشی
تلفن دفتر فصلنامه: 02171732812
تلفن ناشر : 02145355555 - 02145355000
ایمیل: rehabilitationj@gmail.com
